
作者:廖远 实习工程师, 陈鉴宇 华南区工程师
随着工业4.0时代的到来,机器人在工业制造的舞台上成为了主角。除了更高效的代替体力劳动,新型多轴机器人还能完成人类无法完成的动作,控制精度也远超人类。多轴机器人的每个轴就是一个伺服电机系统,轴越多就能完成越复杂的动作,但也对减小体积提出了挑战。因此,提高功率密度是机器人伺服驱动开发中的重要问题。
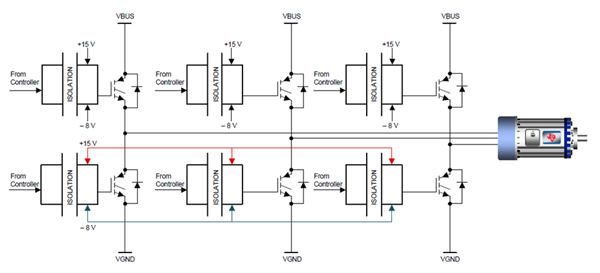
图1. 伺服电机驱动器系统
伺服电机可控制转速、位置,精度很高,在数控机床等工业领域有着广泛的应用。传统伺服电机通常由三相高低侧共六个IGBT组成驱动电路。每个IGBT都要与控制器(controller)隔离,目前多使用光电耦合隔离驱动器。光耦驱动器的隔离侧需要隔离电源供电,如图1所示,三个高侧IGBT分别使用三个隔离的+15V/-8V电源,三个低侧IGBT一般共用一个电源。这四组电压通常由反激电源实现,在变压器的次级做四个绕组就形成了多路隔离输出。
氮化镓技术
作为III-V族化合物半导体,氮化镓(GaN) 具有禁带宽度大、电子迁移率高、介电系数小、导电性能好的特点,用其制作成的氮化镓晶体管(GaN FET)具有导通电阻小、结电容小和频率高的优点,因此GaN FET的导通损耗和开关损耗大约只有Si管的一半。图2是GaN和Si晶体管在损耗方面的对比情况。在高速精密的工业机器人应用场合,GaN具有效率高、功率密度大的优势,能极大缩小电路体积。GaN FET没有寄生的体二极管,所以不存在反向恢复损耗,其开关噪声也比Si管小很多,这能减小失真和EMI。
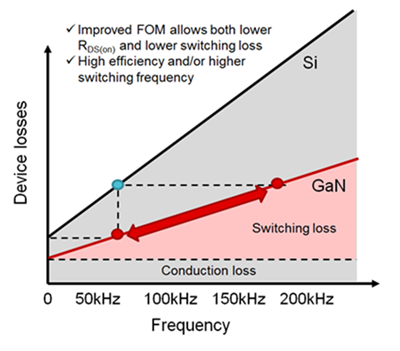
图2. GaN晶体管和Si管的损耗比较
图3是常用功率器件的适用场合。目前GaN晶体管普遍电压在600V以内,适合做1kW级的伺服电机驱动。同时,GaN的频率能做到最高,虽然更高频率会需要更强大的数字处理器,但是高频率伺服驱动也具有更好的控制精度。
另外,碳化硅(SiC)也是现在常用的宽禁带半导体,它的散热更好,目前SiC晶体管的耐压也更高,适于用在更高功率场合。如今在600V以内的场合,GaN比SiC具有明显的成本优势。随着以后GaN FET向高耐压发展,两者还会有更多的比较和竞争。
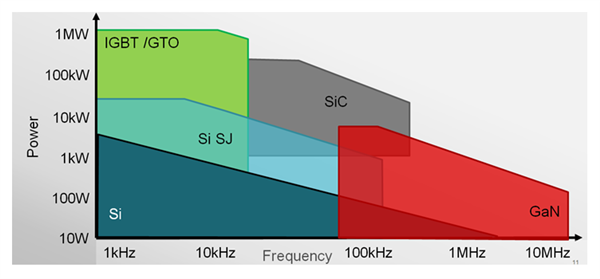
图3. 常用功率器件的适用场合
电容隔离
目前主要的隔离方式分为光耦隔离,磁隔离和电容隔离。对于信号的隔离,光耦隔离是最常用的方案。近十年来,由于用半导体工艺制作电容技术的不断发展,电容隔离的优势越发明显,并成为隔离数字信号更好的方案。如图4所示,使用半导体工艺中常用的隔离材料SiO2作为电容的电介质,利用半导体刻蚀技术加工出一定尺寸的SiO2层,在SiO2层两端分别镀上两个金属电极就形成了一个电容。为了提高隔离电压,再制作出一个同样的电容,两个电容之间仅通过一根金属线连接形成串联的结构。最后整个芯片外围和两个电容之间全部用耐压塑料封装形成一支具有高隔离电压的双电容串联隔离器。
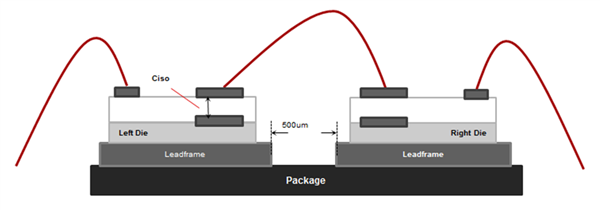
图4. 双SiO2电容串联隔离器
电容隔离需要对输入信号进行调制,经过双电容隔离传输后,在次级解调还原信号。TI使用简单可靠的On-Off调制,将逻辑高电平调制为高频信号,低电平不调制,原理由图5所示。
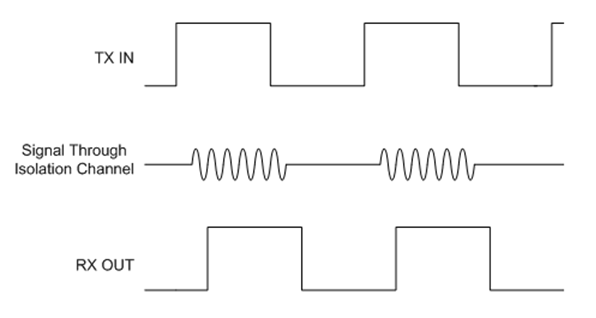
图5. On-Off调制
表1是三种隔离的对比。由于SiO2的电阻率/耐压性较高,再加上双电容串联技术的应用,使电容隔离技术成为现在隔离电压最高的方案。同时,由于SiO2化学特性稳定,不易受温度、湿度、耐压等环境的影响所以电容隔离的寿命能高达40年。
电容隔离器的调制解调电路和晶圆/封装技术都是常用的半导体技术,和其它半导体芯片一样,它的输入到输出的延时(propagation delay)很小。半导体制造技术的高一致性和可靠性也给电容隔离芯片带来了高成品率,使其成本有竞争力。
在伺服电机驱动的应用中,高侧功率管相对于隔离器初级输入有几百伏的电压阶跃,所以还要求隔离器在这种情况下不能有误码。德州仪器使用的On-Off调制技术能提高共模电压抑制(CMTI),保证100V/ns的共模电压阶跃不会产生误码。TI还对调制频率做了抖频处理以分散电磁辐射。
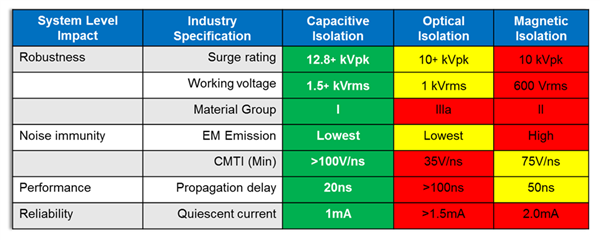
表1. 电容、光电和磁隔离的性能比较
Fly-Buck隔离电源
Fly-Buck从同步降压(synchronous buck)转换器演变而来,将耦合绕组添加到电感上形成一个变压器,这样就实现了隔离输出。
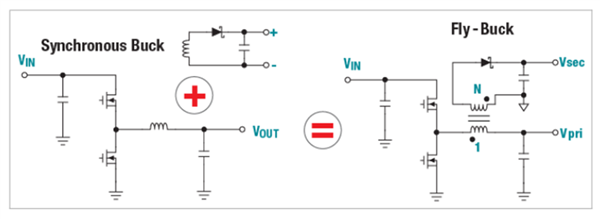
图6. Fly-Buck隔离电源结构
Fly-Buck电源中变压器的工作模式和状态与目前常用的反激电源(Fly-Back)一样,所以设计方法相同。Fly-Buck利用了高集成度Buck芯片的优势,减少了电路体积和外围元器件数量,使隔离电源总体积缩小。图7是相同功率和电压的Fly-Buck和反激电源的元器件数量和电路面积比较。Fly-Buck电源还有一个初级电压Vpri,它可以给隔离器初级供电,这样又节省了一个电源的空间。和反激电源一样,Fly-Buck也可以增加绕组来实现多路隔离输出。
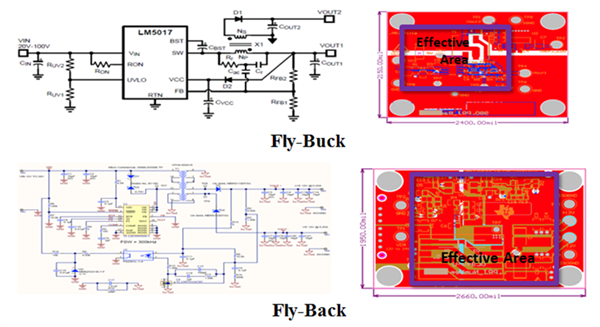
图7. Fly-Buck隔离电源和Fly-Back的电路比较
高功率密度GaN伺服驱动器的设计
采用TI氮化镓和电容隔离方案设计的伺服驱动器如图8所示。LMG3410是集成了驱动的GaN FET功率级芯片。由于GaN FET的开关速度很快,集成FET驱动能最小化线路面积,进一步减小开关噪声。LMG3410同时集成了一个5V稳压器,可以给ISO7831隔离芯片的次级供电。LMG3410还带过流,过温和欠压保护功能。这种高集成度的GaN FET功率级使用起来非常简单方便。详细的方案可以参考TI设计TIDA-00915:http://www.ti.com.cn/tool/cn/TIDA-00915
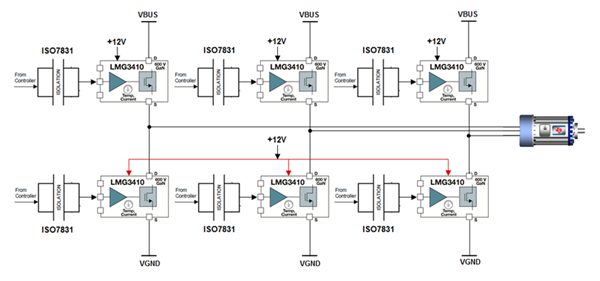
图8. 用LMG3410和ISO7831设计的伺服驱动器
这个系统的隔离电源可以采用LM5160A芯片设计Fly-Buck电源,从而产生四路隔离的12V输出,高侧的三颗LMG3410分别使用三个隔离12V,低侧的三颗LMG3410使用同一个隔离电压。Fly-Buck初级的电源还可以给ISO7831初级电源供电。关于该多路隔离电源可以参考设计PMP10531:http://www.ti.com.cn/tool/cn/PMP10531
这个系统的主要规格如下表所示。相比于IGBT系统,它的体积小、效率好、频率高非常适合多轴机器人的伺服电机驱动。
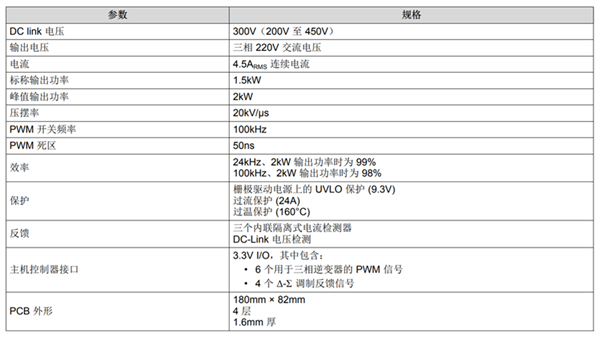
表2. GaN伺服驱动器的规格
参考文献
[1] 用氮化镓重新考虑功率密度https://e2echina.ti.com/blogs_/b/power_house/archive/2017/06/09/52726
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂