C
- 3CCD Camer
所谓的3CCD 系指摄影机的感光元件有分红(Red), 绿(Green) 及蓝(Blue) 三组CCD, 其原理主要是利用光线的波长搭配稜鏡的滤光折射角度, 将影像分别投入到3 组CCD, 其作用是可以让彩色影像颜色更纯正更鲜明。

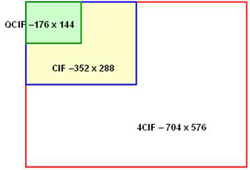
- 4CIF/CIF/QCIF
CIF 是Common Interface Format 的简称, 该规格主要为网路视讯会议影像传输及显示的标准, CIF 的解析度为352 x 288 画素, 另外有较高解析度的称之为4CIF 即解析度提升四位为704 x 576 画素, 同时另外有较低解析度的格式称之为QCIF 即解析度只有CIF 的四分之一为176 x 144 画素。
- Camera Link
所谓的Camera Link 是联合许多家摄影机及影像卡公司所发展出来的一种新的高速串列资料介面标准。由美国公司PULNiX (Camera Link 委员会主席)将它命名为”Camera Link”. Camera Link 是基于美国国家半导体公司(National Semiconductor) 的Channel Link 技术, 提供数位摄影机及影像采集卡一种通用, 高速, 串列可互相连接的接线标准, Camera Link 提供3 种架构– 基础架构(Base Configuration), 中等架构(Medium Configuration) 以及完整架构(Full Configuration) 而资料传输速度最快可以到达2.38 Gbps。

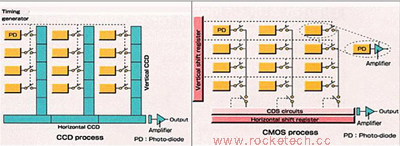
- CCD vs. CMOS
CCD 是电荷耦合元件(Charge Coupled Device) 的缩写, CCD 主要材质为矽晶半导体,透过光电效应,由感光元件表面感应来源光线,从而转换成储存电荷的能力。 简单的说,当CCD 表面接受到快门开启,镜头进来的光线照射时,即会将光线的能量转换成电荷,光线越强、电荷也就越多,这些电荷就成为判断光线强弱大小的依据。CCD 元件上安排有通道线路,将这些电荷传输至放大解码原件,就能还原所有CCD 上感光元件产生的讯号,并构成了一幅完整的画面。
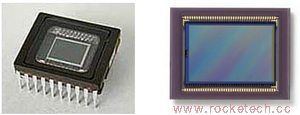
CMOS 是互补性氧化金属半导体(Complementary Metal-Oxide Semiconductor) 的缩写, CMOS 的材质主要是利用矽和锗这两种元素所做成的半导体,使其在CMOS 上共存着带N (带负电) 和P (带正电) 级的半导体,这两个互补效应所产生的电流即可被处理晶片纪录和解读成影像。 CMOS 对抗CCD 的优势在于成本低,耗电需求少, 便于制造, 可以与影像处理电路同处于一个晶片上。
- CCIR
CCIR (International Radio Consultative Committee) 指的是国际广播咨询委员会, 它曾经是一个全球性的组织负责制定早期欧规(625 条扫描线) 黑白电视的视讯标准。而目前以CCIR 601 的标准作为数位影像传输及录影的格式, 同时CCIR 也已变成ITU 国际电讯联盟(International Telecommunication Union)。
- Centroid
所谓的质量中心(Centriod) 指的就是一个形状的重心位置, 对机械视觉而言这是一个2 维的量测. 典型影像二值计算, 其二值的状况是将平均位于X 及Y 的所有黑色画素。 由瞬间的惯性去大量的计算通常结果质量中心为浮点值结果的其中之一。

- Close-up Lens
所谓的特写镜头(Close-up Lens), 是指用来加在摄影机/相机现有镜头前端的一种外加镜头, 用于超近距离拍摄。 它本身是无法单独连接摄影机/相机使用。

- C-Mount/CS-Mount/F-Mount
C-Mount, CS-Mount 及F-Mount 皆为镜头接环的规格, 一般而言F-mount 规格(背焦距离46.5 mm) 的接环大多用于单眼相机或高解析度之工业级摄影机的镜头, C-Mount 及CS-Mount 则普遍应用于一般监控保全或工业级摄影机的镜头, 差别仅在于背焦距离C-Mount 是17.526 mm 而CS-Mount 则是12.5 mm。

- Color Temperature
大部份的光源都不是100% 的纯白, 因此有一种单位°K (Degree Kelvin) 的色温量度规格。比方说中午的日光比早晨或傍晚偏黄的日光相比是最接近白光。 依据色度图(Chromaticity Diagram)可以概略分出一些典型的光源种类。例如: 烛光色温大约是1500 °K, 白炽灯色温大约是3000 °K, 正中午的日光色温大约是5600 °K, 而晴空蓝天的色温则大约是9000 °K。

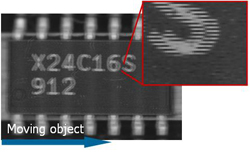
- Comb effect
所谓的梳形(Comb) 现象是指用交错式扫描(Interlaced-scan) CCD 摄影机去撷取移动物体时所产生的现象, 因此对于移动物体的取像最好是采用渐进式扫描(Progressive-scan ) 的摄影机。
- Composite Video
所谓的混合影像(Composite Video) 讯号是将影像的彩色及亮度资料混合一起送出的影像格式, 配线上为单一的同轴电缆线。一般采用NTSC, PAL 或SECAM 任一规范作同步类比影像讯号输出, 主要应用电视或监控保全摄影机。

资料来源:http://www.rocketech.cc/






















 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂