
基于图像识别的摄像机参数求解原理
摄像机成像几何模型和透视变换过程是摄像机参数计算的基础,也是计算机视觉的基础。因虚拟演播室系统对摄像机参数的精度要求很高,角度测量精度须达到0.001°,位置测量精度必达到0.1 mm,比一般计算机视觉应用要求高。在摄像机各个部件中,镜头径向畸变对参数计算精度影响最大,所以采用带镜头径向畸变的小孔摄像机成像模型[4~7]。
根据小孔摄像机成像模型并结合径向约束原理得到如下线性方程组和非线性方程组[8]:

在式(1)、(2)中,f为焦距,k为镜头畸变系数,xwi、ywi、Xi、Yi分别是特标及其相应的图像坐标就可求解摄像机参数,为提高参数求解精度和稳定性,特征点数应尽可能多。作为特征点的图像坐标,一方面本身参与计算,另一方面还应根据标定模板编码方案找到其世界坐标。图2所示给出了基于图像识别的摄像机参数的析取过程。
在机器人视觉和模式识别领域,静止摄像机参数的计算已得到较好的解决,但由于演播室摄像机的特殊性,其参数的实时跟踪还存在许多问题。从图2中可以看出,标定模板编码方案及特征点匹配是参数正确快速析取的关键。
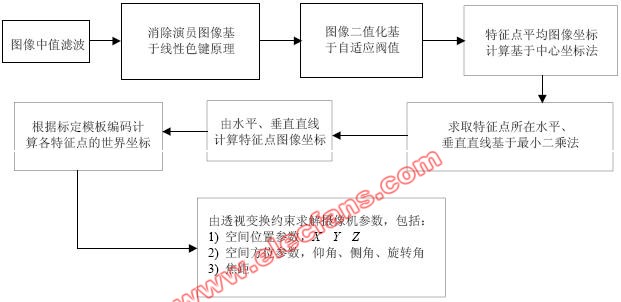
图2 摄像机参数析取过程
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂