
作者:国防科学技术大学 刘树强 谭一舟 王杰
指导教师:史美萍 安向京 费晓曦
作品简介
摘要
我队将于今年八月参加第五届“飞思卡尔”杯全国大学生智能汽车竞赛。针对比赛的具体情况,我们建立了赛车、赛道和自主控制系统的基本模型,给出了理论分析、仿真计算、在线调试的基本开发方法。在比较各种算法的性能特点后,我们确定最终方案,并完成了智能车的制作与调试。
智能车开发过程中,通过比较各种方案,最终我们决定采用电磁感应线圈作为道路传感器。最终方案的思路是:通过对道路传感器所采集的数据进行处理分析,辅助以车模后轮码盘所采集的数据,来判断小车的方位、姿态、速度等,进而控制小车前轮舵机的摆角和后轮驱动电机的速度,使小车在最短的时间内完成比赛。
我们使用比赛指定的唯一控制器 MC9S12DG128B 作为系统的控制核心,用它来进行信号采样、数据传输等动作,并产生 PWM 波控制舵机和电机。
关键词:智能汽车,电磁检测,MC9S12XS128
第一章 引 言 1.1 概述“飞思卡尔”杯全国大学生智能汽车竞赛,是由教育部高等学校自动化专业教学指导分委员会主办的科技竞赛。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神。该竞赛主要由飞思卡尔半导体公司赞助,由清华大学协办,从2006年开始,每年举办一届,目前已成功举办了四届。第三届、第四届连续两届被教育部批准列入国家教学质量与教学改革工程资助项目之一。
比赛按照车模识别路线方案分成摄像头组、光电组和电磁组。通过采集道路图像信息进行路径检测的车模属于摄像头组;通过采集道路少数离散点反射亮度进行路径检测的车模属于光电组;通过感应由道路中心电线产生的交变磁场进行路径检测的车模属于电磁组[1]。其中摄像头组和光电组是历届常规项目,电磁组是第五届新设立的比赛项目。
从智能汽车竞赛第一届开始,我校就十分关注并积极参与进来。经过多年参赛实践,积累了大量知识和经验,在硬件设计、控制算法、调试手段等各方面都打下了坚实基础,同时也存在许多需要改进的方面,特别是控制算法的优化和调试手段的改进。
本技术报告将针对我们的传感器信号处理设计、安装、底盘参数选择、电路设计、控制算法等方面进行阐述,并列出了模型车的主要技术参数。
1.2 电磁车体系结构
按照比赛规则要求,赛车通过检测载流导线周围的电磁场信号来控制车模沿着载流导线前进。在赛道的起跑线处装有永磁铁,标志起跑线的位置,赛车在行驶一圈后需在起跑线处停车。
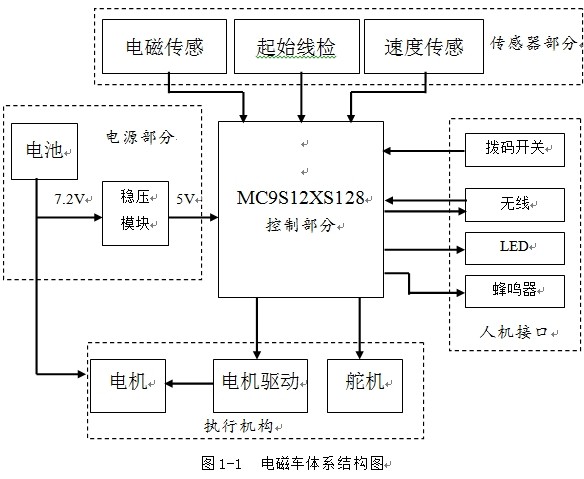
为实现上述要求,设计电磁车体系结构如图1-3。根据功能不同,电磁车体系结构大致包括传感器、控制、执行机构、人机接口和电源五大部分。
全文请访问:国防科大电磁铁军一师技术报告.doc
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂