
作者:洛阳理工学院 郭欣禹 张浩雨 孟旭阳
指导教师:李传锋 高翔
作品简介
nRF24L01无线作为通信模块,(如图)重力感应作为控制模块,着重对无线通信模块进行设计,图像数据传输模式为无线方式。重力感应系统控制小车的前进,按键控制重力感应系统是否开启,这样就能避免在重力感应的影响。

二、小车检测路况部分:
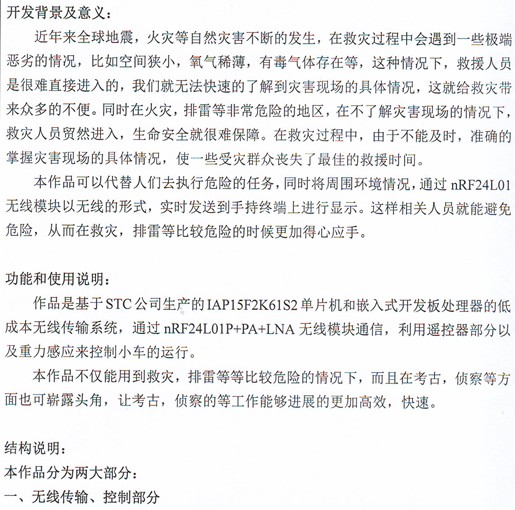
小车部分由超声波、光电开关、电机驱动、小车组成。超声波控制小车的防碰撞、光电开关控制小车的防掉入悬崖之中,直流电机则驱动小车前进,这些都是建立在nRF24L01无线通信模块上。实物总体图如图所示:
平台选型说明
作品是基于STC公司生产的IAP15F2K61S2芯片和Freescale MK10DN512ZVLL10芯片为控制核心。
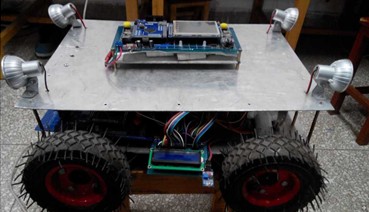
51单片机是STC15系列微控制器,该芯片包含61KB的Flash程序存储器以及2048字节的运行内存,共100个引脚。拥有丰富的模拟,通信等外设。核心板实物图如图2所示:

作品是基于以Freescale MK10DN512ZVLL10芯片为控制核心,相比采用51单片机控制实时性能更好。MK10DN512是 “飞思卡尔” 公司生产的kinetis系列微控制器,该芯片包含512KB的flash存储器以及128KB的运行内存,共100个引脚,采用LQFP封装。拥有丰富的模拟,通信等外设。核心板实物图如图2所示:
设计说明
一、 设计方案实现
1.1总体设计
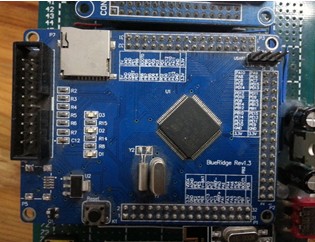
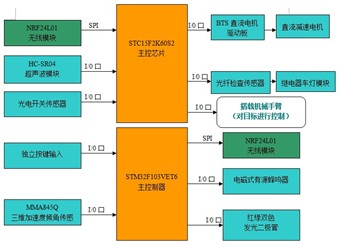
本作品设计的总体框图如图3所示。
二、小车部分
2.1动力驱动设计
2.1.1 直流电机介绍
电机和驱动芯片的选择,通过数据测定和分析比较,确定最佳的设计方案。直流电机容易控制,只需要正负两根线就可以使电机转动,若想使电机反向转动,只需要反接正负极即可。基于第一点优势,可以知道直流电机驱动电路非常容易设计。且直流电机可以节省单片机的输出口,为后续工作提供更多的可操作空间,更便于电路的扩展。同时也可以节约单片机内部定时器和中断资源。原理图如图5
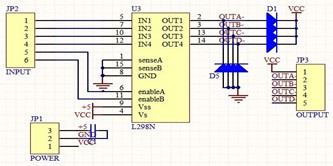
驱动板接口定义如下;
+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为 IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。实物图如图

2.2超声波模块
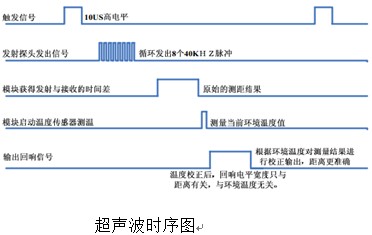
2.2.1:超声波功能介绍
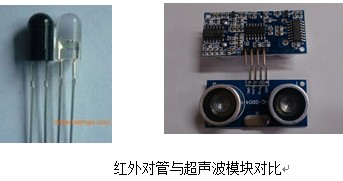
小车壁障时候,要检测前方的路况,考虑了红外对管与超声波。红外对管价格较便宜,但是测距太近,检测到障碍物,车速过快就会撞上,损坏图像采集车,得不偿失。所以采用超声波模块实现障碍物的检测,让运动中的小车能及时的减速躲开障碍物,从而保护小车以及图像采集设备的安全。采用的HC-SR04超声波模块可提供2Cm—400CM的非接触式距离感测功能,测距精度可高达3mm,模块包括超声波发射器、接收器与控制电路。实物图如图7所示:
2.2.2:接线端口
1号:接VCC电源
2号:TX信号端口
3号:RX信号端口
4、5号:GND接地线



 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂