物联网智能交通拥堵判别算法的研究与实现

摘要:针对城市道路交叉口的常发性交通拥堵现象,依据RFID检测系统的特点,提出了一种基于物联网前端信息采集技术的交通流检测方法。并且对城市道路交叉口采集到的交通流量相对增量、车辆的时间占有率相对增量以及地点平均车速等信息进行了对比性分析和统计推导,从理论上论证了交通拥挤产生时的交通流特点,然后以此为基础给出了交通拥挤事件出现时的判别准则,构造出相应的拥挤检测指标及判别算法。最后利用Matlab编程再结合实际交通测量数据验证了算法的正确性。
关键词:RFID检测;交通流参数;流量相对增量;时间占有率相对增量;地点平均车速;检测算法
无线射频识别技术(RFID)是一项非接触式自动识别技术,具有信息量大,抗干扰能力强,操作快捷等许多优点。特别是RFID技术在高速运动物体识别、多目标识别和非接触识别等方面具有优势,使其在很多领域都有巨大的发展潜力,因此把RFID技术应用来针对局部区域的交通智能化而形成“车联网”具有很高的可行性。目前,对交通拥挤事件自动检测算法的研究相对较少,仍然处于初始阶段,并且利用RFID采集交通参数来判定交通拥堵的案例更是少之又少。在中国普遍采用的城市道路交通拥挤自动检测算法主要是以路段上地感线圈检测车流速度的降低、道路占有率的增加以及拥挤车流的存在为依据。算法依据实际路网的通行能力,设定流量和占有率的极限值来划分交通是否处于拥挤状态。但是此种方法采集的交通信息过于单一化,只能采集交通流信息,对于车辆的具体信息必须通过辅助设备才能获取,增加了成本,而且安装时需要破坏路面,影响道路使用寿命。笔者针对物联网与智能交通相结合的需求,提出一套基于RFID的交通流检测方法,并根据扬州市城市道路建设规模以及扬州市各路口与路段统计的车流量特点,对扬州市道路拥挤行为的特征变量进行了深入的分析,以RFID设备采集到的流量相对增量、占有率相对增量以及地点平均车速这3个重要的指标为基础,通过理论推导和统计分析,构造出拥挤自动检测算法,为交通管理部门提供决策依据。
1 交通拥挤检测模型的建立
1.1 交通流参数的选取
道路交通参数是交通拥挤状态自动判别的基础,为了使交通拥挤自动判别具有良好的效果,选择的参数应该具有直观和可靠的特点。应使采用这些参数的算法具有较强的有效性和可移植性。目前,车辆行驶速度、车流量和占有率是评价交通状态最常用的3个交通参数。因此笔者综合采用车辆占有率、流量和速度3个参数作为交通拥挤自动判别的参数。这里的车辆占有率主要是车辆的时间占有率,指在一定的观测时间内,交通检测器被车辆占用的时间总和与观测时间长度的比值。
1.2 交通流参数数据采集处理的基本原理
文中采用RFID数据采集系统作为交通流参数数据采集前端。其由3部分组成:电子标签,阅读器和天线。
基于阅读器可以远距离读取,而且对高速运动的标签也能够准确捕获的原因,在此笔者把其运用到交通领域来采集车辆信息从而反映交通流信息。其采集原理是将射频标签贴在汽车挡风玻璃上,每个标签都是唯一的且对应着特定户主的车辆。标签中存储汽车的身份信息,包括车辆型号、车牌号码、车主姓名、车子有无注册等信息。当贴有射频标签的汽车经过阅读器的辐射场时标签会产生感应电流被激活,然后和阅读器进行无线通信,射频标签将自身编码等信息通过卡内置发送天线发送出去,系统接收天线接收到从射频卡发送来的载波信号,经天线调节器传送到阅读器,然后阅读器把读取的数据传输到计算机数据处理系统进行处理。因此每辆车经过阅读器的RF场时标签被读取的次数、时间、场强及车辆的基本信息都被阅读器记录可供交通部门分析。具体的采集方式如图1所示。

如图2所示,在实际安装应用中,每个阅读器安装完成后会形成一个固定长度L的RF场,阅读器距离地面的垂直高度为H。为了便于分析,文中需要提取每辆车经过阅读器RF场时标签被扫描到的次数、标签被扫描时系统记录的时间以及对应场强值RSSI,阅读器的阅读周期可以设定为T,即每隔T时间扫描一次。系统设定统计时间周期为t,即每隔时间t进行一次数据采样。根据车辆行驶的特征以及RF场长度相对于行程路程较短的特点,可以假定每辆车经过RF场时是平行车道运动的。

假设在第j个时间周期ti内有n辆车通过RF场,第i辆车经过RF场时被检测到的次数为Ni,标签被扫描的时刻记为tik(k=1,2,…,Ni),对应的场强值记为RSSIk(k=1,2.…,Ni)。根据文献提出阅读器接收到的场强值与距离关系的经验公式:
联合公式(1)、(2)、(3)、(4)、(5)、(6)计算出某个周期的检测点车流量,地点平均车速以及时间占有率,根据这些参数值并依据下文介绍的判别算法实现交叉路口交通流拥挤信息的判别。
1.3 交通流拥挤的判别准则
由于道路上交通流的复杂性,在路网中行进的车流运行状态随着时间的变化而时刻改变。在运行行为上,可以用畅通,轻度拥挤,一般拥挤,严重拥挤来描述。根据公安部交通部发布的《城市道路管理评价指标体系》规定,城市路段的平均车速大于30 km/h时被视为畅通;平均车速在20~30 km/h之间时被视为轻度拥挤;平均车速在10~20 km/h之间时被视为一般性拥挤;平均车速在10 km/h以下时被视为严重拥挤。还有文献介绍车辆在信号灯控制的交叉路口,3次绿灯显示未通过路口的状态定义为拥堵路口。根据上述规定,并结合扬州城市道路的规模,在如图3所示的城市道路网中两相邻交叉口之间的路段上距离交叉口150 m的地方安装RFID阅读器,每个阅读器附带天线可以覆盖整个车道的宽度范围。一旦路口发生交通拥挤事件,则阅读器A处的流量将减少,占有率将增加,速度也会减小。但是仅单个从流量或者占有率以及速度的增加、减少来对交通拥挤事件做出判断,往往不能反映出拥挤过程的实质。事实上,由于在单位时间内检测到的车辆数增加,如果车速保持不变,必然导致占有率的增长,如果流量的相对增量大于占有率的相对增量,则可以判断出路口车流在这一段时间内处于消散状态,反之可以判断出车流处于拥挤形成状态。

假设交通流是不间断的连续流,则交通流基本模型成立,即
由(9)式可以看出,当车流在正常运行状态下并且地点平均车速不变时,流量和占有率成正比,且变化率相等,流量的相对增量与占有率的相对增量近似关系可以用y=x直线表示。由此,可以得知在交通事件发生时:
1)当流量的相对增量大于占有率相对增量时,速度在变大,车流趋于畅通状态。
2)当流量的相对增量小于占有率相对增量时,速度在减小,车流趋于拥挤状态。
2 交通拥挤检测算法
2.1 交通拥挤检测算法的基本原理
系统设定采样周期为t,从t0开始统计,把总采样时间划分为若干个时间段,各个时间段都有相同的时间间隔t,划分形式为[t0,t1],[t1,t2],[t2,t3],…[tn-1,tn]…。设A处的阅读器在第j个时间段内检测的流量和占有率分别用QA(j)和CA(j)来表示,地点平均车速用来表示。为了降低误判率,则路口发生交通拥挤事件的必要条件是:
1)A处阅读器在连续3个周期内检测出地点平均车速均小于30 km/h,或者A处阅读器在连续2个检测周期内检测出占有牢相对增量均大于流量相对增量,并且地点平均车速在此两个周期内的值均低于30 km/h。此时可以判定路口严重交通拥挤事件发生。
2)A处阅读器在连续2个周期内检测出地点平均车速均小于30 km/h,并且占有率相对增量大于流量相对增量的时间段不连续,此时可以判定路口一般性交通拥挤事件发生。
3)A处阅读器只在一个周期内检测到地点平均车速小于30 km/h,并且此周期的占有率相对增量大干流量相对增量,此时可以判定路口轻度交通拥挤事件发生。
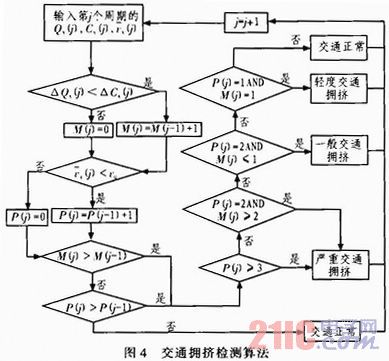
2.2 交通拥挤检测算法的逻辑框图
首先定义图4框图算法中的参数:QA(j)为阅读器A处第j个周期内检测到的流量值;CA(j)为阅读器A处第j个周期内检测到的占有率;为阅读器A处第j个周期检测到的地点平均车速;△QA(j)为阅读器A处第j个周期内的流量相对增量,△CA(j)为第j个周期内的占有率相对增量;v0为根据路口实际情况设定的速度阈值30 km/h;M(j)为占有率相对增量与流量相对增量相比较的计数值,P(j)为地点平均车速低于阈值的计数值。其中△QA(j)、△CA(j)的计算公式如下:
3 算例分析
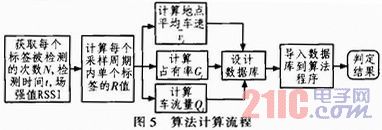
以扬州市文昌路与扬子江路交叉口作为数据采集岗,并以距离停车线150 m的文昌中路上由西向东双车道实际采集到的数据为例,运用图4的检测算法把采集到的交通流数据导入Matlab编写的算法程序,对交通拥挤事件进行判别。具体的计算流程如图5所示。
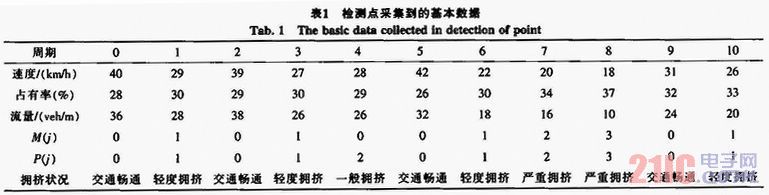
现在取09:11~09:25内分10个采样周期的数据为例作表1分析。经过算法计算得到10个采样周期内每个时间段的交通情况,按照算法流程得到判别指标时序。
程序中的逻辑判断部分代码如下:
4 结论
文中方法以RFID采集的交通流数据为基础,提出了一种新的交通流拥堵检测判别算法,该方法可以为实时交通状态自动识别奠定一定的研究基础,并且突破了传统的交通流检测模式,为物联网引入智能交通提供可能性研究。随着我国大力发展智能交通系统(ITS),以及物联网行业的蓬勃发展,物联网与智能交通相结合是必然的趋势。因此RFID作为物联网的信息采集前端用于智能交通必定有广阔的应用前景。





评论