移动版
EEPW杂志
EEPW《设计100例》
2014年
2013年
2012年
2011年
2010年
2009年
2008年
2007年
2006年
体育投注威廉希尔
威兼希尔公司是什么套
论坛
|
博客
|
投注威廉希尔彩票吗?
|
Datasheet
|
官方威廉希尔备用网址
|
在线工具
500万威廉希尔指数
500万威廉希尔指数
500万威廉希尔指数
500万威廉希尔指数
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=aa277705&cb=%n' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=1&cb=%n&n=aa277705&ct0=%c' border='0' alt='' /></a>
综合
综合
文章
论坛
电路
下载
视频
元件
综合
新闻
论坛
博客
问答
下载
电路
厂商
视频
百科
热词搜索:
interwetten和威廉
放大器
转换器
射频
锁相环
在线会|共谈
ADI智能工厂方案
如何助力双碳目标
ADI在线会
|与您共话工业以太网与工业4.0
水质安全如何更好得知?来此看
ADI解决方案!
想学点
有用的知识
吗?来看看>>
【有奖下载】
工业电机控制开发套件用户指南
【叮咚,请查收你的积分】
看视频,学技术!
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=a2d0553d&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=4&cb=INSERT_RANDOM_NUMBER_HERE&n=a2d0553d' border='0' alt='' /></a>
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=a0de46fd&cb=%n' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=24&cb=%n&n=a0de46fd&ct0=%c' border='0' alt='' /></a>
首页
威廉希尔中文网站
威廉希尔体育在线
嵌入式系统
元件/连接器
电源与新能源
安防与国防
汽车电子
EDA/PCB
消费电子
工控自动化
模拟技术
医疗电子
测试测量
手机与无线通信
光电显示
网络与存储
智能计算
物联网与传感器
深度报道
在线研讨会
EETV
电子方案
资源下载
技术汇
PI技术专区
ADI技术专区
美信技术专区
研华技术专区
贝能技术社区
Fluke技术社区
ZYNQ技术社区
维博专区
Microchip资源专区
Microchip视频专区
Quark技术社区
Xilinx社区
MultiSIM BLUE
Andes专区
TE金属混合保护专区
ADI视频专区
JRC工业技术专区
小蝴蝶创意移植大赛
OpenVINO生态社区
金升阳电源技术专区
Led技术社区
DSP技术社区
FPGA技术社区
MCU技术社区
USB技术社区
CPLD技术社区
Zigbee技术社区
Labview技术社区
Arduino技术社区
示波器技术社区
步进电机技术社区
无线充电技术社区
人脸识别技术社区
指纹识别技术社区
TE金属混合保护专区
罗姆视频专区
互动社区
论坛
博客
问答
投注威廉希尔彩票吗?
积分礼品
E星球
更多
商机
高校
招聘
杂志
会展
百科
工程师手册
Datasheet
技术子站:
安森美(onsemi) 白皮书有奖下载
|
DC/DC电源应用专区
|
Digi-Key 视频专区
|
Keysight物联网测试技术
|
Xilinx中文社区
|
OpenVINO
TM
生态开发社区
|
航嘉-工业电源专家
|
ADI视频专区
|
Mentor资源专区
|
Microchip资源专区
|
Microchip视频专区
|
维博电量传感供应方案
|
PI解决方案中心
|
PI视频专区
|
恩智浦技术资源中心
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=ad9350e4&cb=%n' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=2&cb=%n&n=ad9350e4&ct0=%c' border='0' alt='' /></a>
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=adfddccd&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=10&cb=INSERT_RANDOM_NUMBER_HERE&n=adfddccd' border='0' alt='' /></a>
特别报道
从IPU到数据中心GPU——英特尔ON创新峰会主题报告汇总
一年一度的英特尔ON创新峰会今天晚上召开,在主题演讲环节提及了诸多英特尔和合作伙伴共同开发的创新,并首次发布了IPU和数据中心GPU以及元宇宙相关的话题
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=af4688cb&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=35&cb=INSERT_RANDOM_NUMBER_HERE&n=af4688cb' border='0' alt='' /></a>
牛人业话
更多
智慧路灯杆在高速服务区的应用
PCB过波峰焊缺陷问题产生原因及解决办法
LKCOS权限说明(五):外部认证指令流
农业科技为农业带来了什么?
温湿度变送器PK温湿度传感器,我们应该作何选择?
家用智能投影仪方案开发原理简单介绍
办公室空调节能集中控制方案
新闻
更多
Q1新能源车逆势成长 全球销量破200万
美光宣布全球专利突破5万件
imec连手半导体价值链伙伴 迈向芯片制造净零碳排放
特斯拉被标普500 ESG指数除名
一文带你了解降压型稳压芯片原理
PCB原物料受惠 Q1年增近二成
2022年蜂巢式物联网发展趋势预测
设计应用
更多
基于STM32G070RB的七彩星空灯教程(四)
基于STM32G070RB的七彩星空灯教程(三)
基于STM32G070RB的七彩星空灯教程(二)
基于STM32G070RB的七彩星空灯教程(一)
25kW SiC直流快充设计指南(第四部分):DC-DC级的设计考虑因素和仿真
学习笔记 | STM32 功能安全设计索引
STM32单片机按键电路设计
博客
更多
USB-1610性能参数及应用介绍
北京新超仁达
小夜灯语音识别控制开关芯片,灯具声控方案,WTK6900H
唯创知音电子
超宽禁带半导体的挑战与机遇
旺材芯片
理想汽车,可能要造芯了
旺材芯片
EEPW观点
更多
消息人士透露三星也准备提高晶圆代工价格 最高上调20%
IE浏览器宣布退役:谁能接棒成为下一代浏览器巨头?
2022年TWS耳机会给我们带来哪些新体验?
可穿戴健康设备需要跨越的并非只有技术鸿沟
消息称台积电已通知客户明年价格全面上涨约6%
三星将向美国运营商DISH提供5G设备 通信市场格局或改变?
TI MCU团队裁员始末 是真是假?
如何选择适合自己的无线耳机?需要考虑哪些因素?
Wi-Fi 6还没用上,Wi-Fi 7就来了?
三星正推进3nm工艺二季度量产 若实现将先于台积电量产
CEVA:处理器IP为下一代智能和互联设备提供动力
暴力拆解
更多
拆解报告:全有兴65W 2C1A氮化镓充电器XG65T300
拆解报告:ProMini 130W氮化镓充电器
拆解报告:Tesla特斯拉Model Y 15W无线充电模块WC3
新产品
更多
安森美半导体推出创新的超高密度离线电源方案
KLA发布全新汽车产品组合以提高芯片良率及可靠性
Microchip推出全新实时平台信任根,为系统平台提供完整信任链
Allegro MicroSystems发布针对汽车和工业等应用的4x4mm 50V全桥栅极驱动器
AMD机器人入门套件开启未来智慧工厂
UnitedSiC(现已被Qorvo收购)宣布推出行业先进的高性能1200V第四代SiC FET
儒卓力推出全新开发套件“RDK2”,将缩短产品上市时间
意法半导体推出全新MDmesh MOSFET,提高功率密度和能效
技术专栏
更多
从一张示波器截图谈FIFO
一位工程师的自述:我的单片机成长之路
一文看懂码灵半导体CFW32C7UL系列产品应用(八):高端扫码设备应用(下)
一文看懂码灵半导体CFW32C7UL系列产品应用(八):高端扫码设备应用(中)
一文看懂码灵半导体CFW32C7UL系列产品应用(七):评估板
5G手机中的低功耗内存有多重要?
论坛精华
更多
STM32G070多串口终端实现
jobs
【蓝牙乐器DIY】电子二胡(ESP32版)
我是鹏老师
【蓝牙乐器DIY】卡琳巴拇指琴(51单片机版)
我是鹏老师
【蓝牙乐器DIY】卡琳巴拇指琴(ESP32版)
我是鹏老师
【蓝牙乐器DIY】蓝牙MIDI协议
我是鹏老师
【罗姆BD9G500EFJ-EVK-001】评估板试用报告
zslywl
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=a9102f9a&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=16&cb=INSERT_RANDOM_NUMBER_HERE&n=a9102f9a' border='0' alt='' /></a>
核心技术类目
更多
FPGA
DSP
MCU
步进电机
Zigbee
LabVIEW
无线充电
RFID
STM32
示波器
CAN总线
开关电源
单片机
OLED
PCB
USB
ARM
万用表
CPLD
EMC
RAM
传感器
可控硅
IGBT
逆变器
智能手表
蓝牙
PLC
深度报道
更多
一网打尽可穿戴设备那些事
智能仪表之电表&水表
看完这些你就懂了Type-C
美国欲组建半导体"北约",韩方如何回应?
投注威廉希尔彩票吗?
投注威廉希尔彩票吗?
05月01日
安森美白皮书有奖下载第2期 | 20元京东E卡等你拿
04月12日
【福利】百份京东卡,答题就送!泰克与您共同开启智能汽车的行业未来
03月14日
【活动】邀你自制电子乐器,共同奏响春天的音乐会
12月28日
贸泽电子限时寻宝挑战活动 iPad10超级好礼等你来拿!
高端访谈
更多
闻达精芯之安,泰然创新于世
吴汉明院士对“后摩尔时代的芯片挑战和机遇”思考
关键任务智能系统的云操作系统需要哪些特质
“危”中寻“机”,瑞萨破浪进取
在线研讨会
更多
助力“双碳”目标 — ADI 智能工厂方案
时间:2022年06月29日 10:00
+ 立即报名
工业以太网 --- 无缝联接, 加速工业4.0
时间:2022年05月25日 10:00
+ 立即报名
水质监测——助力守护环境安全
时间:2022年05月24日 10:00
+ 立即报名
最新视频
Mouser
|
ADI
|
Microchip
|
Linear
|
ROHM
|
Maxim
|
Keysight
更多
AD3552R 16位、33 MUPS、多输出范围、多IO SPI DAC
AD35xx系列是一款高速、16位精度、电流输出数模转换器(DAC)。它具有高精......
如何使用Adaptec® maxView™存储管理器刷写固件
手把手教您如何使用maxView™存储管理器更新Adaptec® SAS/SAT......
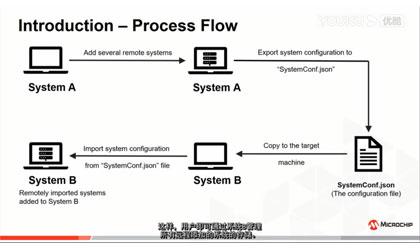
使用maxView™导出和导入远程系统
手把手教您如何使用Adaptec® maxView™存储管理器用户界面从您的网络......
LTC2387-18的ADC驱动器设计考虑因素
本视频将为您介绍用于驱动LTC2387-18 15MHz SAR模数转换器(AD......
ADI BMS isoSPI LPCM
本视频演示了ADI的低功耗电池监控(LPCM)功能,以及该功能如何使用BMS i......
ADI Listn™:音频信号处理软件解决方案
ADI公司深知,沉浸式车内音频体验是影响消费者购买选择的主要差异化因素之一。从信......
叠瓦式磁记录(SMR)驱动器简介
本视频介绍SMR驱动器和相应的Microchip SmartRAID产品支持。......
Microchip动态通道多路复用(DCM)
在本视频中,您将了解到动态通道多路复用(DCM)。这是Microchip SAS......
排行榜
01
华为云IaaS市场排名中国前三、全球前六,增速全球最快
02
2019年全球半导体市场排名出炉:英特尔从三星手里夺回头把交椅
03
2020年Q1全球晶圆代工厂营收排名:台积电第一 三星第二
04
欧洲专利局:华为2019年在欧洲专利申请量排名第一
05
亲密度排行榜:亚马逊第一 苹果第三
电路图
工业控制
|
能源技术
|
汽车电子
|
通信方案
|
无线技术
|
家用电器
分享我的电路
贝能国际推出IMC102T商用冰箱压缩机驱动方案
针对笔记本电脑应用的高能效Vcore电源解决方案
被动无钥门禁
冰箱的高效节能设计
MM9Z1_638: 采用CAN和LIN的电池传感器
基于Freescale 加速传感器的三轴加速度计解决方案
Linear LTC3775高效降压DC转换方案
下载
mentor
|
嵌入式系统
|
模拟IC/电源
|
消费类电子
|
测试测量
分享我的文档
SM5203
szli1006
HL6607ACX
szli1006
HL6606C
szli1006
EEPW2022年4月刊
lindar2000cn
CAM365工艺难点审查讲解视频
ceciletian
图书《量子计算与编程入门》
浮沉1988
dhdjkdi
2022-05-19 13:11:03 下载了资源
基于Proteus智能小车的仿真设计
lanxijun2
2022-05-19 12:38:04 下载了资源
音频测试用音源:粉红噪声和1KHz正弦波(MP3,0dB)
lanxijun2
2022-05-19 12:37:31 下载了资源
音频测试用音源:粉红噪声和1KHz正弦波(MP3,0dB)
lanxijun2
2022-05-19 12:37:11 下载了资源
音频测试用音源:粉红噪声和1KHz正弦波(MP3,0dB)
技术专区
ITECH公司汽车电子测试解决方案
新能源汽车测试解析
Huntkey航嘉精彩亮相CES 2020:带来多款工业电源&适配器
航嘉专区
探索PIC®和AVR®单片机上的可配置逻辑外设
Microchip视频专区
工业适配器产品方案
航嘉专区
电池测试和模拟解决方案
新能源汽车测试解析
适合SiC MOSFET的SCALE-iDriver – 可为800V电动车逆变器提供安全高效的驱动
PI专区
每月视频有奖问答2020第06期
Microchip资源专区
威廉希尔体育在线
MCU
|
电感
|
新能源
|
智能交通
|
辅助驾驶
|
存储器
|
iphone
|
智能监控
|
LED调光
|
逻辑分析仪
|
云计算
|
无人机
嵌入式
基于STM32G070RB的七彩星空灯教程(四)
基于STM32G070RB的七彩星空灯教程(三)
基于STM32G070RB的七彩星空灯教程(二)
基于STM32G070RB的七彩星空灯教程(一)
学习笔记 | STM32 功能安全设计索引
元件/连接器
闻达精芯之安,泰然创新于世
晶体管、MOS管、IGBT辨别与区分
豪威集团发布高PSRR低噪声线性稳压器WL2848D
电源
25kW SiC直流快充设计指南(第四部分):DC-DC级的设计考虑因素和仿真
新一代单片式整合氮化镓芯片 升级功率电路性能
一文带你了解降压型稳压芯片原理
Allegro MicroSystems发布针对汽车和工业等应用的4x4mm 50V全桥栅极驱动器
意法半导体推出全新MDmesh MOSFET,提高功率密度和能效
安防电子
马斯克或出售SpaceX股份为收购推特筹钱 估值1250亿美元
强势反弹——2021年中国网络安全服务市场规模同比增长41.7%
罗戈津喊话马斯克“负责”:SpaceX向“亚速营”提供“星链”地面终端设备
美国白宫发布两项推进量子技术发展的总统指令,防范量子威胁
36氪专访IDC中国研究副总裁钟振山:国内CSO的职责需要持续被认知,深入理解业务是这一群体的最大挑战
汽车
华为与车企,只差个工厂
电动汽车快充:是“续航里程焦虑”的解药吗?
车用级Linux车联信息系统加速崛起
EDA技术
英特尔扩充晶圆代工生态系 将帮助其先进制造与代工业务发展
imec连手半导体价值链伙伴 迈向芯片制造净零碳排放
颇尔集团投资新工厂支持不断增长的半导体需求
UnitedSiC(现已被Qorvo收购)宣布推出行业先进的高性能1200V第四代SiC FET
ASML:现有技术能实现1nm工艺
消费电子
VMware:75%企业将数字化员工体验视为关键事项
Blaize与Innovatrics携手提供边缘就绪的低功率低延迟面部识别技术
意法半导体推全套型STGesture手势识别技术
苹果的可穿戴革命:从AirPods说起
高通凭借对全新平台的投入和“高通可穿戴设备生态系统加速器计划”扩展可穿戴设备市场布局
工业控制
功率半导体-马达变频器内的关键组件
AMD Kria机器人入门套件 启动未来智能工厂
AMD机器人入门套件开启未来智慧工厂
模拟技术
如何使用SSR实现更高可靠性的隔离和更小的解决方案尺寸
复旦微电子推出低功耗超宽电压I2C串行EEPROM
场效应管常用的三大作用:放大作用、恒流输出、开关导通
开关电源MOS管有哪些损耗,如何减少MOS管损耗
浩瀚芯光推出新款功率放大器MH368
医疗电子
健康管理稳步进入高速发展阶段,促进医疗卫生事业高质量发展
微芯片脑部植入物让瘫痪男子能够重新说话
后疫情时代的消费者有哪些预期?
科学家用线虫打造的芯片:可更快更精准检测癌症
感测光的声音:以医用光声成像技术 解析人体组织
测试测量
基于PicoScope 9000实现高速电信号眼图测量
是德科技助力5G赋能垂直产业
罗德与施瓦茨推出新型室外频谱监测与无线电定位解决方案
通信技术
世界电信日|英特尔庄秉翰:破解“银发时代”的难题,发力5G夯实数字经济“底座”
世界电信与信息社会日:比科奇以创新5G技术赋能美好生活
物联网产品Wi-Fi标准的关键考虑因素
中国电信首发“量子高清密话”:采用国产芯片的量子SIM卡
郭明錤:其他苹果配件也将随iPhone换用USB-C接口
光电显示
BOE(京东方)携手上汽飞凡汽车实现柔性OLED车载应用新突破 打造智能座舱新“视”界
富采强攻Micro LED 明年营收添翼
千亿京东方,何时穿过周期迷雾?
苹果iPhone14将配备中国公司京东方制造的显示屏
没想到来得那么快?中企正式停供苹果,外企断供的局面清晰了!
智能计算
Xilinx推出Kria自适应系统模块产品组合,在边缘加速创新和AI应用
AWS防护混合云资安环境 趋势科技助防进阶部署
IE浏览器6月16日正式退役被送上热搜 Edge官博郁闷喊话
网络与存储
不断升级的USB-C接口
AMD携手高通 为Ryzen处理器优化FastConnect连接系统
美光宣布全球专利突破5万件
中国GPU崛起!4K、GDDR6X通杀!只可惜一点
三星出样最快GDDR6显存:24Gbps速度背刺GDDR6X
服务
官方威廉希尔备用网址
|
E周刊
|
会议及展览
|
高校
|
Datasheet
|
样片申请
|
投注威廉希尔彩票吗?
|
资讯
电子产品世界2022-04期杂志阅读
碳中和背景下基于LoRa组网的智能化无土栽培种植系统的设计*
BLE蓝牙通信卡蓝牙功能的技术研究与测试
基于单片机的FM收音机设计
基于STM32的家庭互联网检测系统设计
基于嵌入式的GUI设计与实现
关于深化应用智能巡检机器人的方法研究
基于STM32单片机的智能家居测量系统设计*
基于ESP32的卡林巴琴制作教程
学贯中西(6):阐述ML分类器的工作流程
如何用无桥图腾柱功率因数校正控制器实现出色的AC-DC功率转换效率
免费索阅杂志
友情链接:
(联系qq:58529788)
意法半导体STM32中国官网
|
IT之家
|
Win7之家
|
diy硬件
|
21IC电子网
|
电子技术应用
|
新浪数码相机
|
中国LED网
|
华强电子网
|
电子发烧友
|
电力
|
114IC电子元件交易网
|
站长网
|
电子元器件商城
|
教学设备
|
采购网
|
西陆军事
|
互联网数据
|
新闻中心
|
飞象网
|
中国ic网
|
企业名录
|
万维家电网
|
城市中国
|
企业黄页
|
绿色软件联盟
|
和讯科技
|
蜂鸟网
|
光明网科技
|
电子元件技术
|
OFweek中国高科技行业综合门户
|
元器件交易网
|
电源网
|
土木在线
|
金升阳电源模块
|
移动通信网
|
仪器仪表网
|
B2B电子商务网站
|
智能界网
|
锂离子电池
|
慧聪电子网
|
世强元件电商
|
物联网开发
|
2018信息港
|
商城系统
|
51电子网
|
站长之家
|
分析测试百科网
|
期刊投稿
|
跨境电商
|
维库电子市场网
|
CAD
|
索比太阳能光伏网
|
环保
|
懂视
|
更多>>
技术社区:
WCDMA/GSM
|
RFID-SIM
|
DVB-S
|
Multi-Agent
|
Ad-Hoc
|
WLAN
|
S7-300PLC
|
S7-300
|
S7-200CN
|
DDR2-SDRAM
|
Pro/E
|
Pro/E5.0
|
dV/dt
|
BTL
|
T-Flash
|
Modbus-RTU
|
模块电源
|
不间断电源
|
IQ
|
电抗器
|
脉宽调制
|
光伏制造
|
BGA
|
谐振器
|
仿真技术
|
脉冲发生器
|
EPP
|
高压变频器
|
Altair
|
PA
STC
ARMADA
隆达
SK海力士
Teledyne
综合群:
网友一群 174024964 | 网友二群 234419887 | 网友三群 169487503 | 网友四群:243359601 | 网友五群:415028116 | 高校联络官 327349274
专业技术群:
四轴飞行器 369865628 | CPLD/FPGA 321628923 | 嵌入式 Linux 231942816 | 渔猎PCB 108378684 | 51单片机DIY 343082837 | Cypress交流群 165259313 | DSP小组 125568088 | 模拟电子小组 229417095 | Intel Quark开发者俱乐部 363029023 | Xilinx Zynq交流群 323470211
活动交流群:
全国电赛超级交流群 282736475 | 单片机大赛选手群 325384055 | 电子设计大赛选手群 325384431 | 单片机吧官方活动交流 129012019
Copyright ©威廉希尔 官网app
京ICP备12027778号-2
北京市公安局备:1101082052
京公网安备11010802021577
关于我们
联系我们
广告服务
人才招聘
友情链接
网站地图
关闭
<a href='//www.cazqn.com/ad/www/delivery/ck.php?n=adabbc80&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='http://ad.eepw.com.cn/www/delivery/avw.php?zoneid=12&cb=INSERT_RANDOM_NUMBER_HERE&n=adabbc80' border='0' alt='' /></a>