车载以太网和AURIX™ TC4x 千兆以太网/时间敏感网络概览

前言
本文引用地址://www.cazqn.com/article/202406/460415.htm在近代急速发展的汽车技术因素下,不断引伸出不同场景下对汽车功能的使用需求。当中产生了对汽车通讯功能要求上的大幅度提升,因此功能更先进和更强大的车载以太网已经渐渐地变成了车身通讯必不可缺的成员之一。
文章会从了解现今对车载网络(In-Vehicle Network)的应用需求开始,看看车载以太网是怎样通过自身强大的网络功能,满足日新月异的汽车通讯功能要求,获得不同汽车生产和开发商的信任和使用,同时最后也会分享英飞凌最新的AURIX TM TC4x系列微控制器是如何满足客户对高速以太网络和时间敏感网络的各方面需求。
车载以太网概览
2.1 车载网络的应用需求
谈到新一代汽车发展,多数人都会直觉地把注意力放到新旧能源车的竞争上,两边势力都在不断改进产品来吸引消费者,这带来了多种汽车技术的不断改良和突破,其中汽车在智能化和电子化这两方面的改进就更为急速。
汽车智能化最具体的功能就是自动驾驶、智能底盘、智能座舱等;而电子化更加是在汽车不同功能提升下的参与或贡献者,可以说电子化都参与到如自动驾驶系统、底盘控制系统、动力控制系统、车身控制系统、座舱控制及娱乐系统等。
下面本文会从四个维度看看这些改进对车载网络需求带来了什么改变。
1
频宽要求
自动驾驶应用带来了大量数据资料如影像信息,激光雷达信息,毫米波雷达信息的传输要求。
娱乐系统对频宽要求主要發生在大量的影像类资源经网络传到不同的ECU上。
2
实时性和可靠性要求
自动驾驶在计算时,必需要按时接受外在环境的数据资料;在控制时,操控要求也需要按时到达目标。
可靠性如网络设计上是否支持故障处理和冗余处理。
3
成本要求
车身上的电子化激活了大量电子装置的使用,这些不仅带来了对ECU存放空间问题外,还在车身上产生大量的连线,线材重量和放置空间都带来很大的成本。
4
网络安全要求
自动驾驶的使用和汽车电子化带来装置发展出具备从网络接收命令和执行行动,如果网络传输被恶意攻击或控制便会出现很严重的安全问题。
2.1.1
频宽要求
就频宽要求上的影响性看,其中两个比重较多的应用可算是自动驾驶和娱乐系统。自动驾驶的核心当然是高效的计算能力,但用作计算的数据资料如影像信息、激光雷达信息、毫米波雷达信息及各种车身传感器等,这些都需要大量数据传输,因而大大增加了对频宽的要求。这些影像信息或激光雷达信息如果需要以原始数据方式传送到自动驾驶芯片进行处理的话,那些应用频宽都是以Gbps为单位,而高分辨率的毫米波雷达也都需有超过1Gbps的要求,但其他的传感器对频宽要求就相对较少,一般都不会超1Gbps了。而作为执行结果的动力控制和底盘控制的数据传输,相比下就没有直接对频宽有太高要求。
娱乐系统也可能会对频宽有所要求,如果系统需要把大量的影像类资源经网絡传到不同的ECU上,这样便会对频宽有大量要求了。
2.1.2
实时性和可靠性要求
自动驾驶的实现上也会对网络的实时性和可靠性也有十分严格要求,如在计算时,外在环境的数据资料必需要按时传到自动驾驶芯片;而在控制时,操控要求也需要按时到达目标。这些通讯都不能被延迟超过设计要求,所以能否估计或控制会出现的传输延迟是十份重要的。另外,可靠性也是重要的一环,如网络设计上是否支持故障处理和冗余处理等。
2.1.3
网络安全要求
随着自动驾驶的使用和汽车电子化,车身上很多装置都会连接到不同网络,这些装置都可以具备从网络接收命令和执行行动。如果网络传输被恶意攻击或控制便会出现很严重的安全问题,所以网络安全也开始成为车载网络的基本要求了。
2.1.4
成本要求
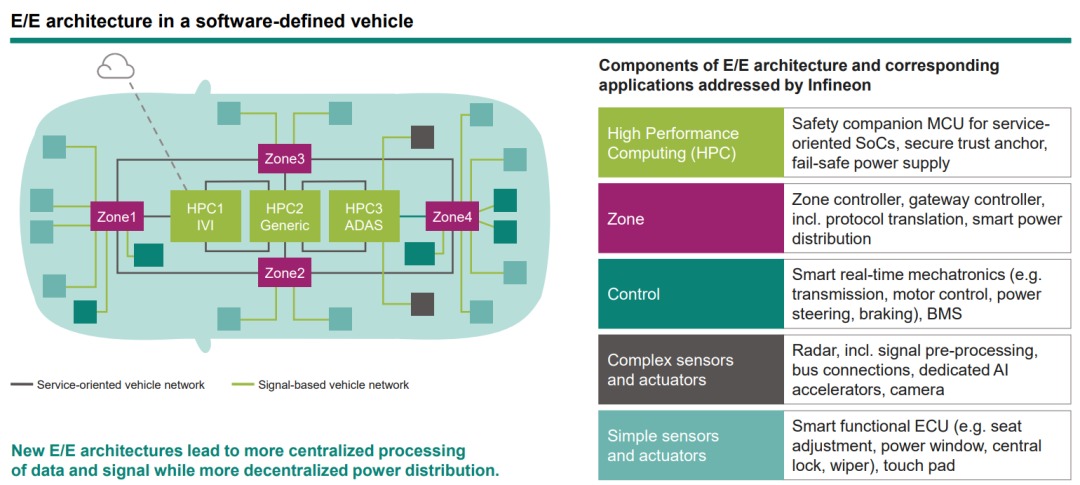
随着对车身上的不断电子化,车身上增加了大量电子装置,这些装置都有可能分布到车上不同的位置。除了装置本身占用的空间问题外,还在车身上产生大量的连线,如何设计使用这些连线,包括网络通讯,控制讯号及电源线等,这些都使工程师对汽车架构改进更新带来了很大的推动力。现在比较认同的发展方向是区域汽车架构(Zonal architectures),简单来说就是把装置从之前以功能划分到不同的域控制器(Domain controller)的域汽车架构(Domain architectures),改变为到把装置以实际地域划分到不同地区上的区域控制器(Zone gateway/controller)。多个区域控制器和中央控制器(Central controller)之间再互相连接,这样装置只需要连接到最近区域控制器上,连线的线材可以大大减少,从而减少线材、载重和空间上的不同成本。另外,不同的功能也可以整合到区域控制器,有机会減少ECU的总使用数量。
区域汽车架构的发展对汽车网络和软件架构都带来了改革,车载网络有可能从异质网络(Heterogeneous network)走向同质网络(Homogeneous network),软件架构也会住面向服务架构(SOA)方向发展。
2.2 不停改进的车载以太网技术
车载以太网提供了多样的协议和设备标准,适用于车载网络的各种应用。在接下来的部分中,我们将探讨车载以太网在各种层面上是怎样有效地对应车载网络的种种特别要求和解决应用上的各种痛点。
2.2.1
全方位的网络介质对应方案
车载以太网支持多种物理层标准,以下是列出一些有关的主要标准:
传输 100 Mbps(适用于 100BASE-T1 PHY 的 IEEE 802.3bw-2015)
传输 1 Gbps(适用于 1000BASE-T1 PHY 的 IEEE 802.3bp-2016)
传输 10 Mbps(适用于 10BASE-T1S PHY 的 IEEE 802.3cg-2019)
传输2.5G、5G和10Gbps(适用于 2.5G/5G/10GBASE-T1 PHY的IEEE 802.3ch-2020)
这些标准满足对网络频宽的不同要求,能有效地对应不同车载网络对高低频宽的使用要求,从而提供了达成同质网络的可行方案。这样可以减少因为使用异质网络区时,域控制器在进行数据转发时需要进行的额外转输格式处理,而造成的传输延误和占用硬件资源问题。
还有的是这些标准都是使用单双绞线,这样也可以减少空间及重量所产生出来的成品问题。
2.2.2
AVB 和TSN 的支持
实时的传输要求在最早的以太网路设计上并非主要考虑,但因为之后出现不同使用上的需要,以太网络也不断地出现了一些新的标准,当中的AVB和TSN 协议就被广泛应用在车载网络上。
2.2.2.1 AVB 协议
为应付实时的影视音讯要求(如视像镜头、娱乐影音等),传输的延迟有了一定程度上的要求。IEEE 802.1 工作小组便针对这些问题开展了工作,订立了IEEE 802.1Q网络协议及AVB 协议,主要适用于车载网络协议如下:
IEEE 802.1Qav-2009
(Queuing and Forwarding for AVB Bridges)
定义规则以确保优先级流将在预留中指定的延迟内通过网络。
IEEE 802.1Qat-20210
(Stream Reservation)
预留协议用于通知路径中的各个网络节点预留支持特定流所需的资源。
IEEE 802.1AS-2011
(Timing and Synchronization for
Time-Sensitive Application)
协议提供在网络中实现通用的时间概念,使终端站和交换机能够相互同步本地网络时钟。
2.2.2.2 TSN 协议
虽然AVB协议提供了音频/视频使用的解决方案,但它并不适合时间关键和安全关键的控制流量。为此,从2012年开始,開始了TSN工作小組,以取代之前的AVB工作小組,主要适用于车载网络协议如下:
IEEE 802.1Qbv-2015
(Enhancements for Scheduled Traffic)
增强预定流量控制,引入了传输门机制来支持预定流量,能要求帧传输按照预定义的时间表进行。
IEEE 802.1Qbu-2016
(Frame Preemption)
与IEEE 902.3br 结合,IEEE 802.1Qbu 实现帧抢占,把帧分为快速帧(实时帧time-critical)和可被抢占帧(即尽力而为帧best-effort)。实现帧抢占的优点是减少实时帧的延迟,因为它们不需要等待整个尽力而为帧的传输,但可以在某个时刻抢占它。
IEEE 802.1Qci-2017
(Per-Stream Filtering and Policing)
该标示能通过阻止流或端口来进行错误检测和缓解并遏制错误,以便错误不会在网络上传播,从而提高网络可靠性。
IEEE 802.1QCB-2017
(Frame Replication and Elimination for
Reliability FRER)
通过利用帧识别功能,该标准在多个不相交的网络路径上提供帧复制和传输,以增加至少一个副本成功传送到最终目的地的概率。
IEEE 802.1AS-2020
在IEEE 8021AS-2011中提供的切换过程不是很快,可能会导致某些节点的时间跳跃。新的IEEE 802.1AS-2020支持多个同步主时钟和多条同步路径,以实现无缝低延迟切换和故障模式下时间同步的快速恢复。
AVB和TSN协议都能有效满足车载网络对实时性和可靠性的使用要求。
2.2.3
加密的支持
安全性也是通信中关注的问题之一,IEEE 802.1工作组也在研究如何在TSN网络中采用现有的IEEE安全机制。其中MACsec IEEE 802.1AE-2018 协议为车内ECU 交换的数据提供链路到链路加密和保护,并添加安全标记、完整性检查值、数据包编号字段和加密。该协议定义了数据封装、加密和认证的帧格式,应用IEEE Std 802.1X协议提供Peer-to-Peer方式密钥建立机制,实体地保护整个或部分网络的安全。
目前正在运行的P802.1AEdk 项目是IEEE Std 802.1AE-2018 标准的修订版。该标准指定了MAC隐私保护封装协议及其与MAC 安全协议(MACsec)的结合使用,以隐藏用户数据帧的源MAC 地址和目标MAC地址,并减少可观察到的帧大小和传输时序之间的任何相关性。
2.2.4
对网络协议应用的强大支持
车载以太网标准是由知名标准机构提供的,是一项成熟的技术可满足负载和集成的需求。使用以太网路也更直接有效地使用种类繁多,功能全面和安全可靠的网络和应用协议。提供了很多应用的现有解决方案,从而减少从零开始的设计和开发时间。
3.1 AURIX TM 对以太网路的支持
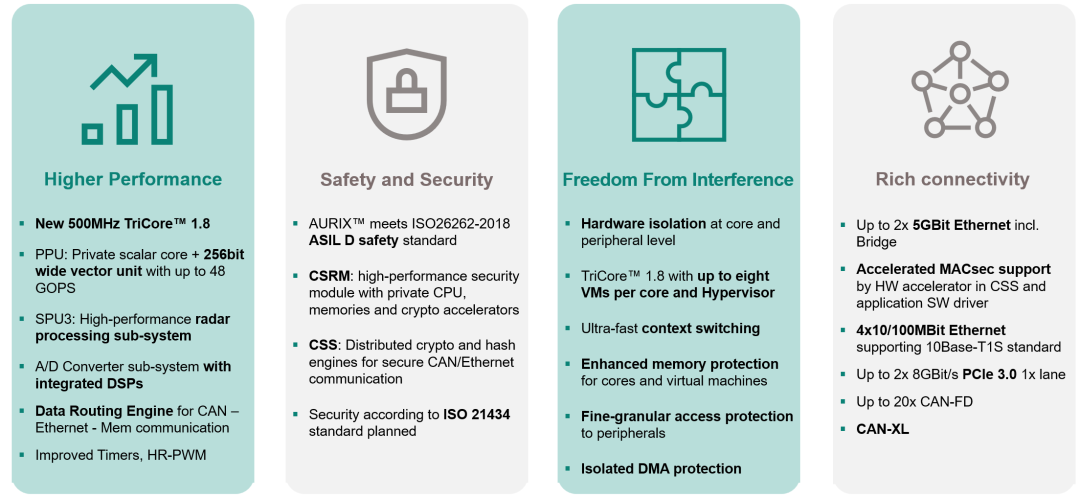
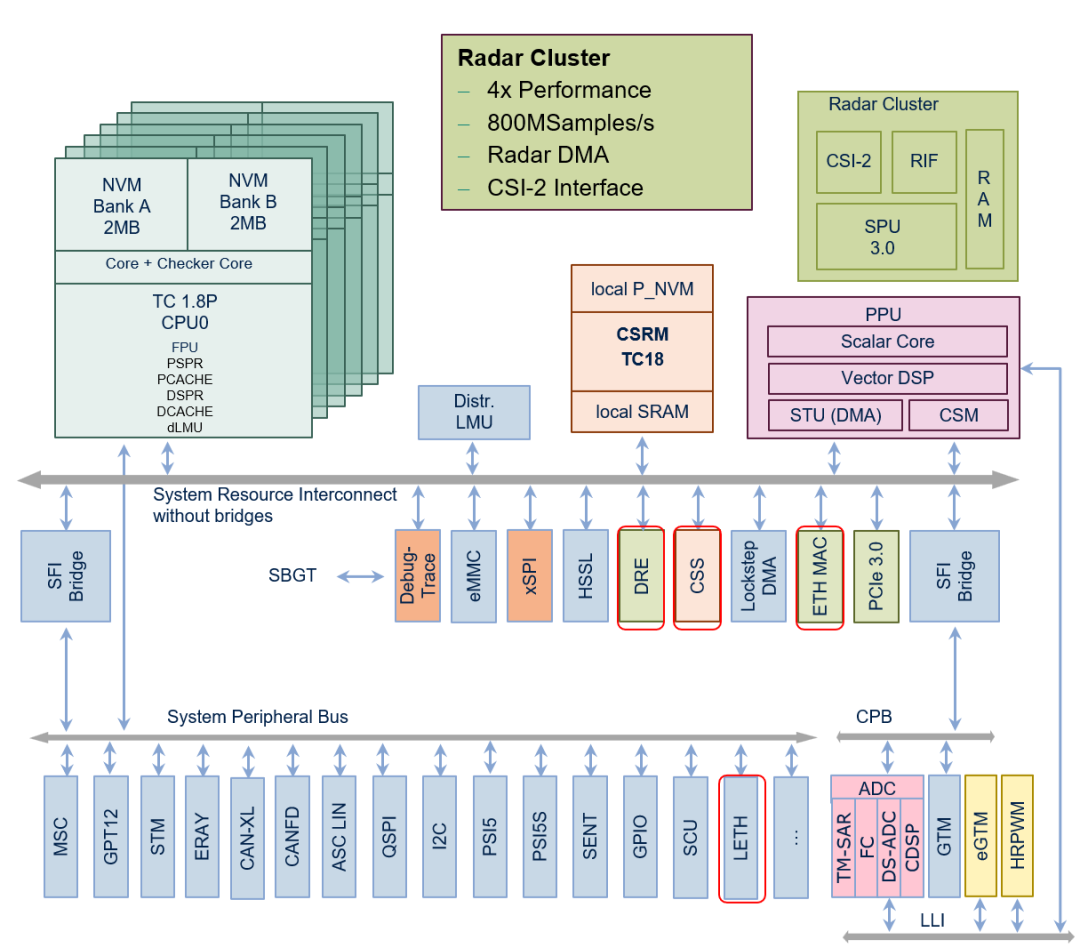
AURIX TM TC4x架构增强了安全性和连接性。
1
高速和时效性的Gigabit Ethernet GETH
(ETHMAC)
支持高达 2x5GBit以太网,包括桥接器,以太网端口支持IEEE 802.1 AVB和TSN协议的硬件要求。
2
广泛性的Lite Ethernet(LETH)
支持 4x10/100MBit以太网速度,另外还支持了10Base-T1S标准,把以太网的应用范围延伸到一些传统ECU需要的低速数据通讯领域。
3
安全的Cyber Security Satellite(CSS)
用于安全CAN/以太网通信的Crypto和Hash引擎。
总结
现在汽车发展正在从传统的域汽车架构(Domain architectures)到区域汽车架构(Zonal architectures)以及硬件定义汽车(Hardware-defined cars)到软件定义汽车(Software-defined cars)的过渡中,而使用更高程度的ADAS/AD的个人消费类汽车将会更加普及,车载以太网在车载网络的渗透率对会不断提升。
通过利用新一代AURIX TM TC4x对以太网和安全网络的各种功能,帮助汽车行业ECU开发人员,获得对应新一代汽车平台上的优质解决方案,从而实现更快开发时间和更安全汽车平台更新计划。









评论