步进电机构造与控制

在上面的可变磁阻步进电机的简单示例中,电机由一个中心转子组成,该转子被四个标记为A、B、C和D的电磁场线圈包围。所有具有相同字母的线圈都连接在一起,因此通电(例如标记为A 的线圈)将导致磁转子与该组线圈对齐。
本文引用地址://www.cazqn.com/article/202306/448142.htm

在上面的可变磁阻步进电机的简单示例中,电机由一个中心转子组成,该转子被四个标记为A、B、C和D的电磁场线圈包围。所有具有相同字母的线圈都连接在一起,因此通电(例如标记为A 的线圈)将导致磁转子与该组线圈对齐。
通过依次向每组线圈通电,可以使转子旋转或从一个位置“步进”到下一个位置,其角度由其步距角结构确定,并且通过按顺序对线圈通电,转子将产生旋转运动。
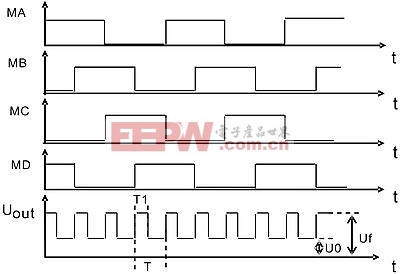
步进电机驱动器通过按设定顺序对励磁线圈通电来控制电机的步距角和速度,例如“ ADCB,ADCB,ADCB,A… ”等,转子将沿一个方向(正向)旋转,并通过将脉冲序列反转为“ ABCD、ABCD、ABCD、A… ”等,转子将沿相反方向(反向)旋转。
因此,在上面的简单示例中,步进电机有四个线圈,使其成为 4 相电机,定子上的极数为 8 (2 x 4),间隔为 45 度。转子上的齿数为六个,齿距为 60 度。
然后,转子有 24 个(6 个齿 x 4 个线圈)可能的位置或“步数”来完成一整圈。因此,上面的步距角为:360 o /24 = 15 o。
显然,更多的转子齿和/或定子线圈将导致更多的控制和更精细的步距角。此外,通过以不同的配置连接电机的电气线圈,可以实现全步角、半步角和微步角。然而,为了实现微步进,步进电机必须由(准)正弦电流驱动,其实施成本昂贵。
还可以通过改变施加到线圈的数字脉冲之间的时间延迟(频率)来控制步进电机的旋转速度,延迟越长,一整转的速度越慢。通过向电机施加固定数量的脉冲,电机轴将旋转给定角度。
使用延时脉冲的优点是不需要任何形式的附加反馈,因为通过计算提供给电机的脉冲数量,就可以准确地知道转子的终位置。这种对设定数量的数字输入脉冲的响应允许步进电机在“开环系统”中运行,使其控制起来既容易又便宜。
例如,假设上面的步进电机的步距角为每步 3.6 度。要将电机旋转 216 度的角度,然后再次停止在所需位置,总共只需要:216 度/(3.6 度/步)= 80 个施加到定子线圈的脉冲。
有许多步进电机控制器 IC 可供选择,可以控制步进速度、旋转速度和电机方向。SAA1027 就是这样一种控制器 IC,它内置了所有必需的计数器和代码转换,并且可以按正确的顺序自动将 4 个完全控制的桥输出驱动到电机。
旋转方向也可以选择单步模式或沿选定方向连续(无级)旋转,但这会给控制器带来一些负担。当使用 8 位数字控制器时,每步也可以有 256 微步
SAA1027步进电机控制芯片

在本关于旋转执行器的教程中,我们研究了有刷和无刷直流电机、直流伺服电机和步进电机作为机电执行器,可用作位置或速度控制的输出设备。
在下一篇关于输入/输出设备的教程中,我们将继续研究称为执行器的输出设备,特别是使用电磁力将电信号再次转换为声波的输出设备。我们将在下一个教程中看到的输出设备类型是扬声器。









评论