LED行车灯电路

在这篇文章中,我们将看到不同的LED跑马灯电路,这也被称为LED骑士电路。这些电路可用于汽车、摩托车、自行车等,因为它们会给观众带来吸引人的视觉效果。
本文引用地址://www.cazqn.com/article/202305/447073.htm我们使用非常简单的元件创建了4个不同的LED运行灯电路。在第一个电路中,我们在基于晶体管的可控多晶振荡器的帮助下实现了一个闪烁的LED。
第二个电路是基于IC CD4017的,其中我们有追逐式LED。在这个电路中,LEDs只是以一种顺序的方式一个接一个地打开。第三个电路也是用CD4017实现的。在这个电路中,LEDs将以不同的模式发光,即双向运行的LEDs。
在最后一个电路中,LED最初以单程方式运行,然后以反向方式运行。这意味着,当它来回走动时,其模式与钟摆相同。
这个电路可以用来美化汽车,也可以在汽车抛锚需要帮助的危机时刻发挥作用。
我们将在下面的章节中看到这些电路的细节,如电路图、所需部件和工作情况。
简单的LED行车灯电路(闪烁的LED)
在这个项目中,我们设计了一个简单的LED闪光灯电路。我们使用了两组LED(一侧3个,另一侧3个),它们将被交替打开,所以结果是一个明亮的闪烁的LEDs。




电路图

所需元件
2个2N2222A (NPN晶体管)
2个22μF - 50V电容器(极化)。
2 x 46 KΩ 电阻器 (1/4瓦)
6个8毫米亮白LED
12V电源
连接线
面包板
项目的工作
从电路图中可以看出,该项目是基于简单的Astable或自由运行的多频振荡器。当打开电路时,一个晶体管将被打开(处于饱和状态),另一个将被关闭(截止)。
假设Q1处于开启状态,Q2处于关闭状态,电容C2将通过串联LED充电。由于LED被连接在电流的路径上,它们将被点亮。
在这段时间内,由于电容C1的放电,晶体管Q2是关闭的(因为负极板与Q2的基极相连)。在时间常数C1R1之后,电容C1完全放电并开始通过R1充电。
充电方向是相反的。随着电容器的充电,它建立了足够的电压(0.7V),使晶体管Q2导通。这时,电容器C2开始通过Q2放电。
由于连接到晶体管Q1基极的电容器C2的板变成了负值,晶体管Q1被关闭,这组LED被关闭。
现在,电容器C1开始从相应的串联LED(通过Q2的基极)充电。由于这组LED连接在电流路径上,它们将被打开。
现在,电容器C2放电,完全放电后,它将通过R2开始充电。随着电容C2中电荷的增加,当电压达到0.7V时,它将使晶体管Q1导通。从这一点上看,这个过程与前面一样重复。
使用CD4017和555的LED追逐器电路
LED骑士系列的第二个项目是一个使用CD4017十进制计数器和555定时器IC的LED追逐器电路。我们将看到这个项目的电路图、使用的元件和工作情况。
电路图

所需元件
1 x CD4017十进制计数器IC
1 x 555定时器IC
1 x 18 KΩ 电阻器 (1/4瓦)
1 x 2.2 KΩ 电阻器 (1/4瓦)
1 x 100 KΩ 电位器
1 x 1 µF - 50V 电容(极化)。
1 x 0.1 nF 陶瓷盘电容(100 pF 代码 101)
10 x 8mm亮白LED
连接线
5V电源
面包板
项目的工作
在这个项目中,我们设计了一个简单的LED追逐器电路,其中的LED一个接一个地打开,给我们带来了一个LED追逐另一个的效果。现在我们来看看这个项目的工作情况。
我们在电路图中注意到的第一件事是,电路中有两个部分:555定时器部分和带LED的CD4017十进制计数器IC部分。在这个项目中,555定时器IC被配置为一个可控硅多谐振荡器。
在这种模式下,它产生一个脉冲,其频率由元件R1(2.2KΩ)、R2(18KΩ)、VR1(100KΩ)和C1(1μF)决定。脉冲的频率可以通过调整100KΩ的POT来控制。
这个脉冲被送给CD4017十进制计数器IC作为其时钟输入。通过了解CD4017的工作原理,它在时钟输入引脚上每收到一个时钟脉冲,计数就会增加1,因此每个输出引脚在每个相应的时钟脉冲下都会变成高电平。
由于它是一个十年计数器,我们将得到一个10的计数,由于我们将明亮的白色LED连接到输出引脚,当相应的引脚变成高电平时,每个LED将被打开。
在10个时钟脉冲之后,计数被重置并将从头开始。如果将LED以环形方式放置,我们就会得到一种追赶LED的感觉和外观。
带有11个LED的双向运行LED,CD4017和555定时器IC
这是另一个运行中的LED电路,但与之前的运行中的LED电路不同的是,在之前的电路中,它被设计成一个单程运行的LED电路,而在这个电路中,LED将以两种方式运行。
电路图

所需元件
1 x CD4017 十进制计数器集成电路
1 x 555定时器IC
1 x 18 KΩ 电阻器 (1/4瓦)
1 x 2.2 KΩ 电阻器(1/4瓦)
1 x 470 Ω 电阻器 (1/4 瓦)
1 x 100 KΩ 电位器
1 x 1 µF - 50V 电容器(极化)
1 x 0.1 nF 陶瓷盘电容 (100 pF 代码 101)
8个1N4007 PN结点二极管
11个8毫米亮白LED
连接线
12V电源
面包板
项目的工作
双向运行的LED项目的工作与LED追逐者电路类似,只是LED的方向不同。 我们现在来看看这个项目的工作情况。
555定时器部分(其操作与上述电路中解释的类似)产生一个脉冲信号,作为时钟输入给CD4017计数器。与CD4017的Q0相连的LED6将首先亮起。
与CD4017的Q1相连的LED5和LED7将接着点亮。连接方式如电路图所示,这个过程一直持续到Q5,它与LED1和LED11相连。直到这一步,LED的单程照明将被完成。
为了实现LED的双向点亮,Q6被连接到LED2和LED10,Q7被连接到LED3和LED9,以此类推。
最后的效果将是一个双向运行的LED,其顺序如下: LED6(Q0),LED5-LED7(Q1),LED4-LED8(Q2),LED3-LED9(Q3),LED2-LED10(Q4),LED1-LED11(Q5)为一路,随后是LED2-LED10(Q6),LED3-LED9(Q7),LED4-LED8(Q8),LED5-LED7(Q9)。
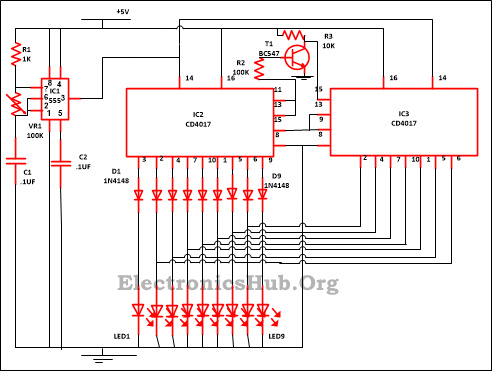
LED骑士电路图电路图:
该电路所需的元件:
集成电路
NE555 - 1
CD4017 - 2
电阻器
R1 (1K) - 1
R2 (100K) - 1
R3 (10K) - 1
VR1 (100K) - 1
C2, C1 (.1uf) - 2
D1-D9 (1N4148) - 9
晶体管(BC547) - 1
LED1-LED9 - 9
说明:
为了熟悉电路的工作布局,熟悉各个引脚是很重要的。
这个集成电路有16个引脚,其中3个是输入引脚,10个是输出引脚,一个是接地引脚,一个是电源引脚,剩下的一个是输出引脚。如下所示,IC CD4017的引脚图。
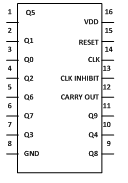
IC CD4017引脚图1. 输入引脚:
复位针脚(针脚15)--计数器通过这个针脚复位到零。假设你希望计数器从第三个引脚开始计数,那么你需要将第四个输出端与15引脚相连。因此,在每一个第三次输出后,计数会自动从零开始。
时钟引脚(14号引脚)--每次IC的14号引脚移动到高电平时,都会提供输出。就像时钟的初始脉冲,3号针脚会给你输出,同样,下一个时钟脉冲到达时,2号针脚也会提供输出,以此类推。在10个时钟脉冲之后,它将再次从Q0输出开始。
时钟抑制引脚(引脚13)--该引脚用于将计数器的状态从ON变为OFF,反之亦然。如果你想关闭计数器,针脚13应该达到最高状态。如果它处于高电平状态,那么它就不会关注时钟脉冲,不管你按了多少次开关,都意味着计数不会向前。在我们的电路中,第13针是接地的。
2. 输出引脚(引脚Q0-Q9)-以顺序的方式从这些引脚接收输出。比如3号针脚会给你第一个脉冲的输出,以此类推。
3. 接地引脚(8号引脚)和电源引脚(16号引脚)--对于集成电路的工作,8号引脚提供接地,而电源则由16号引脚提供。
4. 4. 输出引脚(12号引脚) - 在这个引脚的帮助下,可以连接一个或多个CD4017集成电路。假设你想再连接一个CD4017,那么就把12号引脚与它的后代的输入时钟相连。一级CD4017的载波引脚与第二个时钟输入端相连接,同样,第二个载波引脚与第三个时钟输入端相连接,以此类推。你可以在电路图中看到这一点。
NE555和CD4017是两个集成电路,该电路是基于这两个集成电路和其他一些组件。在这个电路中,集成电路555定时器被用来作为一个星形振荡器。
IC CD4017被用作一个CMOS计数器/驱动器。每次当它得到时钟脉冲时,它通过时钟输入获取时钟脉冲,所有的10个输出依次打开。这是众所周知的IC,它在其他各种项目中非常有用,如追光器、矩阵模。
在这个电路中,集成电路NE555被用作一个星形模式,用于为电路产生一个时钟脉冲。这被用来给IC1的第3脚提供一个振荡波,该脚是用来输出的。
通过VR1的帮助,可以改变振荡的速度。555定时器的振荡频率可以通过以下方式计算
f=1. 44/(R1+2* (VR1) *C1)
在这个电路中,由于我们采用了两个十进制计数器,所以计数将从0开始到16。电路中的IC2完成了0到9的计数,而在二极管的帮助下,其余的计数将由IC3完成。
在555定时器获得电源的情况下,IC1的第3脚输出到CD4017的第14脚,这又为IC2工作提供了时钟脉冲。CD4017在得到时钟输入后从零开始计算(因为它有内置的计数器)。
在14号引脚移动到高电平后,它被逐一转发到每个引脚。就像初级阶段的输出Q0将在3号引脚接收,LED1将闪烁,LED2将从4号引脚发亮,以此类推。
当计数器到达11号引脚即第九输出端时,它将产生一个临时的高电平,这个高电平被耦合到13号引脚(时钟抑制)。如果14号引脚处于高电平,时钟脉冲将被忽略,IC2的计数停止。
而作为回报,IC3的15号引脚变成低电平,因为先前的晶体管BC547是高电平状态。由于这个低信号,IC3的15号针脚在短时间内被重置为低电平,IC3的输出从Q0(针脚3)开始统计,并逐个向前移动。
当它到达Q8的时候,也就是第9脚再次与IC3的第13脚相连,因为无论输入信号如何,IC3都会停止计数。如果引脚13处于高电平,则引脚14不理会时钟脉冲,这意味着IC3停止计数。
这将再次给IC2的15脚复位,现在由IC2开始计数,IC3的计数被禁止。
这也意味着,当IC2的输出计数完成后,IC3的计数也会停止,同样IC2也会在IC3的计数时停止。因此,从IC3接近的输出信号以相反的方向传送到IC2。






评论