基于图像检测的光伏面板自清洁系统设计与实现*
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询

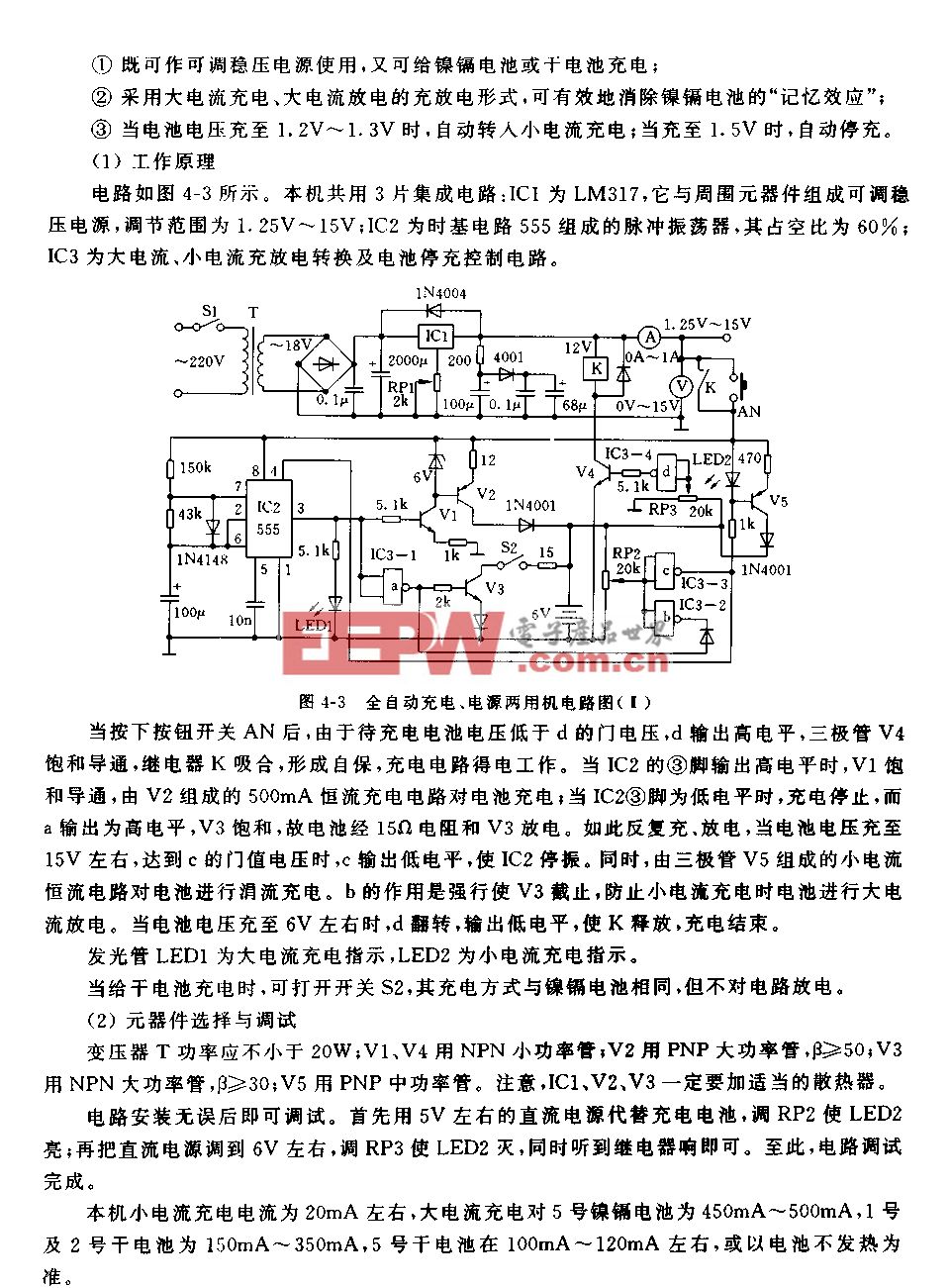
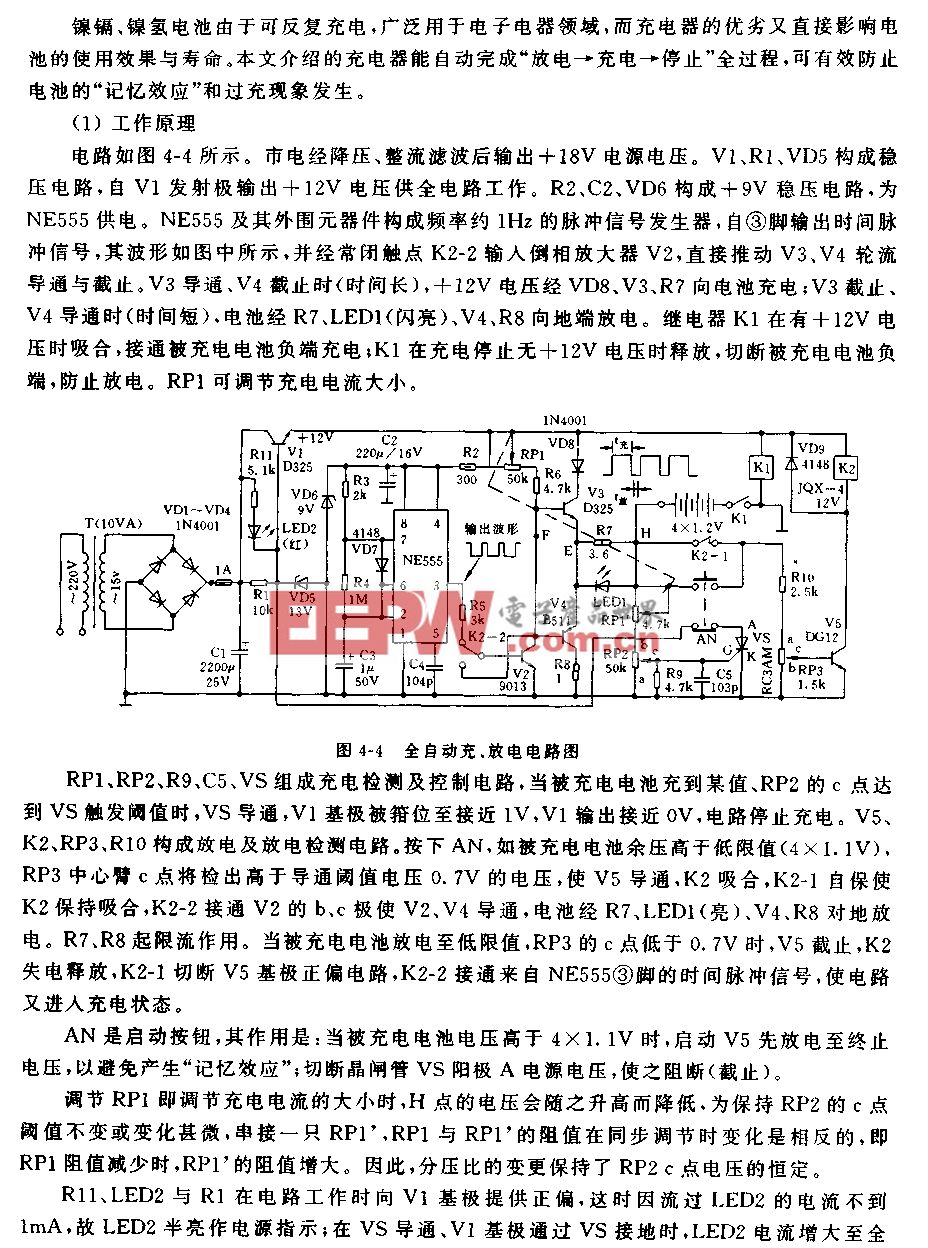
0 引言
随着太阳能产业的迅速发展,其使用规模不断扩大。光伏面板表面沾染的扬尘、积雪等杂质会使其发电效率大幅降低。此外,经过长时间的日晒,其表面会出现裂纹及热斑,可能严重破坏太阳电池组件,甚至造成不可预估的灾难,所以极有必要进行实时热斑检测。
市场调查显示,目前太阳能板维护装置只能实现清洁功能,故现迫切需要一套兼具清洁和检测功能的太阳能板机构,以最大限度地优化现有设备。对家庭而言,可直接实时检测太阳能板表面并进行简单操作,降低发生事故的风险。对于企业而言,可以达到定时清扫太阳能板及自动查找裂纹的功能,最大限度地提高经济效益。
1.1 系统需求分析
目前世界上普遍认为晶硅光伏电池的平均寿命是25~30 年,非晶硅光伏电池的寿命也在15~20 年以上,其他材料的太阳能光伏板使用寿命也被认为在20~30 年左右。
影响太阳能光伏板使用寿命的原因主要有光伏电池效率衰减(晶硅光伏组件效率衰减一般平均为0.5%~1%);组件内部电池脱焊,由于太阳电池片之间的间距设计不合理或焊接质量不良,且组件昼夜间温差使焊带和电池之间每天都要经历热胀冷缩的运动,最终导致焊带和电池片焊接脱焊而导致组件报废;太阳能光伏组件工作环境恶劣,日温差:-30~+70 ℃;由于太阳电池片之间的间距设计不合理或焊带质量不良,导致由于组件昼夜间温差使焊带每天都要经历热胀冷缩的弯折运动;恶劣气候对光伏组件的破坏:昼夜、东西温差、风沙、雪荷载等。
目前太阳能光伏板面临以下痛点问题:
1)灰尘、积雪阻挡光线;
2)维护成本高、能源效率低;
3)对面板清洗、检查困难;
4)面板制造时隐裂、碎片等;
5)应用过程中“热斑效应”。
为此,光伏面板清洁与监测系统设计有以下几个需求。
1)提高能源转换率
● 对面板的清洁能力增强;
● 及时检测到热斑和裂纹,并反馈。
2)提升维护效率,减少人力成本
● 自动化程度大幅提升;
● 远程控制的实现。
1.2 系统接入设计
本产品通过外置清刷装置挂载在目标太阳能板上,由主机和从机协调配合执行各项任务。通过挂载在太阳能板顶端的移动机构,可实现清刷机构在目标太阳能板上的横/ 纵向移动。置于清刷机构内部的两列滚刷,可对目标太阳能板板面进行清刷扬尘及积雪。清刷机构的机身装有太阳能电源管理模组,对机器本身进行能源收集,以增加续航。同时还配备摄像头进行面板表面裂纹视觉监测。该系统利用蓝牙实现本地主从机的信息交互;利用无线模块与服务器进行传输数据,再由服务器与用户前端进行数据交互及控制。总体结构设计框图如图1所示。

图1 总体结构设计框图
1.2.1 主机控制系统总体介绍
在本地系统中,主机主要负责信号的传输/ 处理与清刷功能。其控制系统安装层如图2 所示。
1.2.2 主机结构设计总体介绍
● 第1 层
第1 层为四轮从动轮,同时装有两列滚刷,用于对目标太阳能板的清刷其表面灰尘、微粘黏、积雪杂质。两列滚刷均由一台低扭矩、高转速马达通过同步带轮带动。

图2 主机控制系统安装层框图
● 第2 层
第2 层主要为控制系统安装层。装载了主控芯片树莓派以及其他传输信号板等电路。为了实现检测功能,在二层上部装有由齿轮及齿条为主要的推出机构,并在该机构上安装一颗OV2640 摄像头;当需要使用视觉检测功能时,由微型马达带动齿轮旋转,推出齿条;齿条末端装有摄像头及其支架。即可实现回收摄像头,以保护摄像头在恶劣环境下导致的短路及其他故障。
● 第3 层
第3 层主要为太阳能光伏系统,可为整套系统收集工作能源。该系统在满足太阳能电源收集条件下,通过各类传感器收集电路中的各类状态数据,并发送至MCU 进行处理及存储。此外针对不稳定的环境因素进行备用供电模组设计搭建,保证在恶劣环境下迅速恢复,实现不断点持续稳压稳流送电。同时利用物联网技术构建数据可视化页面进行实时电源监控[1]。
1.2.3 从机控制系统总体介绍
从机在整套装置的顶端,主要负责信号的收集和带动主机在目标太阳能板上的移动,置有两个马达与回收主机机构。其控制系统安装层如图3 所示。

图3 从机控制系统安装层框图
1.2.4 从机结构设计总体介绍
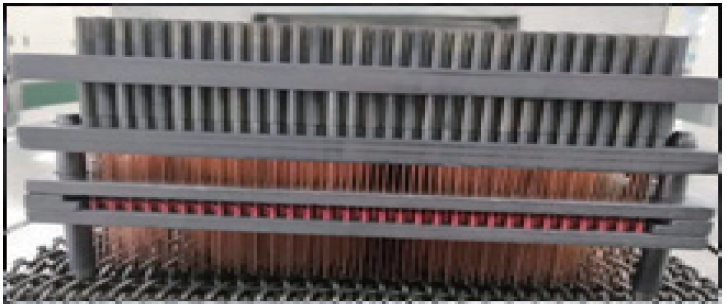
1)传动机构
传动结构主要位于目标太阳能板上方的金属滑块。
● 通过一个双出轴直流电机带动绕线轴,以线缆的缠绕带动主机,做到稳定、上下来回地牵引。为减少重力对于此过程的影响,选用转矩较大的马达。
● 为达到行程限位,在主机上、下各安装了两个接近开关,以保证装载在主机上的清刷机构在太阳能板上来回清刷。
● 选用步进电机带动装载在从机上的金属滑块在目标太阳能板上方做横向运动。步进电机能通过脉冲信号转为角位移,从而做到精确控制运动速度和位移,这对于步进电机的扭矩的选择要求同样严格。通过传统的一横一纵的传动方式,即可让主机全方位覆盖目标太阳能板,做到高效率、全自动、全覆盖的清刷。
2)回收装置
回收装置主要用于主机完成一个纵向行程单位的清刷任务后进行抬起且磁吸回收;回收后移动一个横向行程单位,消磁放下主机进行下一个纵向清刷任务。
1.3 基于图像检测的自清洁装置控制设计
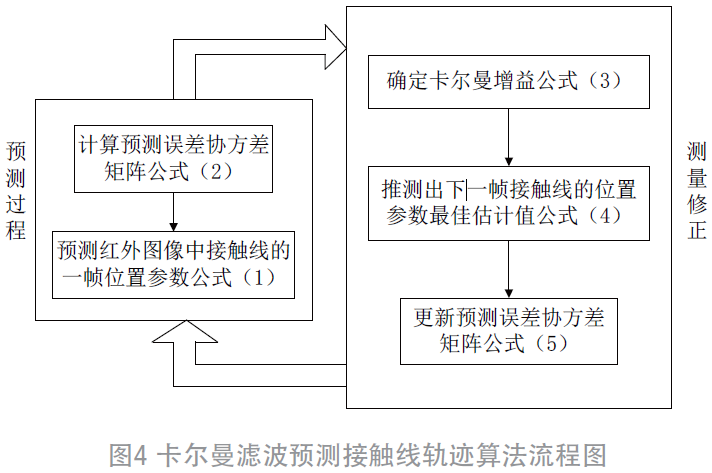
用户可通过手机端小程序对光伏面板进行实时监测、清洗,并及时收到面板表面安全隐患的提示。本产品在夜间可对目标太阳能面板进行清刷,同时利用视觉对目标太阳能面板进行图像采集及分析目标太阳能面板表面状态[2],以完成裂纹检测。系统工作流程如图4 所示。
装置在白天利用热像仪热斑检测太阳能电池组件上各电池片的发热状况。正常情况下,各电池片的温度分布均匀;如果存在组件矩阵中有个别电池片温度异常过高,就说明此电池片可能有问题,用户便可及时使用微信小程序查看太阳能板实时图像,进行远程控制。用户端也可查看能源转换的数据[3]、设备状态数据,以达到用户在日常使用光伏系统的过程中,实现智能化、高效化和低成本。


图4 系统工作流程
1.4 软件可视化设计
1.4.1 平台应用页面设计
平台内上传图片,添加可视化元素,并将元素与数据点进行关联后,实现图标数据更新可视化。通过平台的发布审核,用户群体即可通过URL 链接访问生成的应用界面。最终后端维护平台界面效果如图5 所示。

图5 平台可视化界面
1.4.2 小程序页面设计
用户可以通过操作小程序实现对光之翼管理平台的基本页面,如图6 所示。
小程序的制作主要涉及三种编程语言:html、JavaScript、css。在页面制作完成后,利用mqtt 协议实现本地、小程序和服务器之间的通信。




图6 光之翼小程序
实现小程序websocket 连接功能的关键语句如下:
var client = new Client(‘122.51.28.233’,61614,that.randomString());
2 系统迭代的方向与可能性
在原系统的基础上,未来依然有很大的发展空间。在可视化界面的应用上,可将自动化清洗检测与实时天气挂钩,通过预判的天气情况实现自动化操作。与此同时,利用机器学习,对大量光伏板裂纹与热斑的检测数据进行分析与算法优化,使系统的精准度得到进一步提高。
其应用领域可拓宽到光伏扶贫助农。随着我国扶贫政策的推进,“光伏扶贫”已成为重要的扶贫内容之一。
光伏扶贫主要涉及住房屋顶和农业大棚上铺设太阳能电池板。通过分布式太阳能发电,每户人家都将成为微型太阳能电站。但新闻资讯及江西、云南的实地调查显示,在光伏面板给众农户带来收入的同时,对大批光伏面板的管理也成为他们面临的一大问题,若管理不当,不仅会大大降低光伏面板的使用寿命,更可能给农户带来危险。本装置紧跟国家政策,扶贫助农,可协助各农户高效、便捷、准确地实现对大批光伏面板的管理,带来更多收益,减少资源浪费。
3 感悟与总结
3.1 难点与改进
3.1.1 机械结构
由于光伏面板较脆弱,在其上作业的机器不宜体积过大、重量过重,这对整台机器的外形设计及尺寸把握是个挑战,既要留有足够空间余量,又要控制得当。此外,考虑到强度、刚度等要求,需根据《机械设计手册》综合考虑[4],最终确立传动方案,选择相关硬件及材料。
未来的改进会放在毛刷清洁部分,目前仅能处理大量灰尘堆积,未来将向无尘化靠拢,例如为毛刷附上静电吸附材料,制作自清洁排尘装置等。
3.1.2 电控设计
本装置通过ESP8266 通信MQTT 服务器, 从而传输数据至微信用户小程序,而后 Arduino Mega 2560硬串口通信ESP8266 控制主机上的滚刷清扫、机盖张开、齿轮传动、图像摄取以及蓝牙通信等功能。由于ESP8266 连接WiFi 会有短暂的延迟,从而导致与Arduino Mega 2560 硬串口通信会短暂打印0、1 代码,Arduino 单片机误以为接受数据控制电机传动。考虑到数据延迟及硬串口通信占位,在成功编译运行ESP8266wifi 程序之后便注释掉相关冗杂代码。供电线路设计,由于装置涉及传动机构较多,供电系统选择既要考虑到电池容量、输出电压电流,还要根据光伏面板的性能及实际效率设计合适的“光之翼供电系统”。
3.1.3 电机选择
本装置电机涉及范围较广,既有直流电机亦有交流电机。从机装置通过双出轴直流电机牵引主机于光伏面板上纵向运动,考虑到主机质量、体积等因素,该直流电机的输出转矩选定为2.5 N·m;但又考虑到电机连续工作方式下,额定功率与温升有着一定的函数关系:


因此,当A 与η N 均为常数时,电动机额定功率PN与允许温升τ max 成正比关系,绝缘材料等级越高,电动机额定功率越大。同时,上式还表明,一台电动机允许温升不变时,若设法提高效率、提高散热能力,都可以增大它的额定功率[5]。
除此之外,电机的选择还要考虑到安装方式、防护方式、额定电压、额定转速、过载倍数等因素。结合《电机拖动与基础》[5] 综合考虑种种因素,最终确定电机选择方案并经过多次实验测试确定最终方案。
3.2 比赛参后感
大学为我们提供了许多探索科技、创新实践的机会与平台,作为大学生的我们不应仅着眼于课堂理论知识的学习,更应该将理论运用到实践中。建立项目团队并参加科创竞赛,从发现问题、提出创意到做成实物、日益完善的过程中,自己亲手解决一个个问题,整个团队共同克服各种困难,这些都将成为我们学习生涯中无可替代的宝贵经历。在“中国制造2025”、“工业4.0”的时代背景下,我们将继续带着对知识的渴求与对创新的热情,不断探索,力争为科技事业的进步添砖加瓦。
参考文献:
[1] 刘根水,蒋健,陈炜.基于物联网和云计算的可视化工程测量平台设计与实现[J].网络首发,2020.8.21.
[2] 胡慧之,陈从悦,惠蕴心,等.基于STM32的人脸识别门禁系统的设计[J].电脑知识与技术.2018(34):176-177.
[3] 赵智敏,李俊峤,谢涛,等.基于微信小程序云开发的客观题练习程序设计与开发[J].电子世界.2020(16):66-67.
[4] 闻邦椿.机械设计手册[M].北京:机械工业出版社,2010.
[5] 李发海,王岩.电机拖动与基础[M].3版.北京:清华大学出版社,2013.
(本文来源于威廉希尔 官网app
杂志社2021年1月期)





评论