基于图像识别的ADAS系统解决方案

本文是从视觉系统在ADAS中扮演的角色、视觉系统构成以及核心部分的图像识别芯片三部分了解此方向的发展。
1 第一部分 ADAS中的视觉系统
随着汽车产业竞争激烈,汽车购买者将新技术视为购

图1 未来的ADAS系统普及率 (Strategy Analytics)(公开数据)
 图2 部分厂商系统表
图2 部分厂商系统表
买新汽车的决定关键,使得某些高配置平民品牌的汽车也在
接受度上超过了豪华车辆低配置接受度,加上欧洲、美国和 日本等地道路安全局的要求和评分系统,使得ADAS辅助驾 驶系统变成了一个必需品。
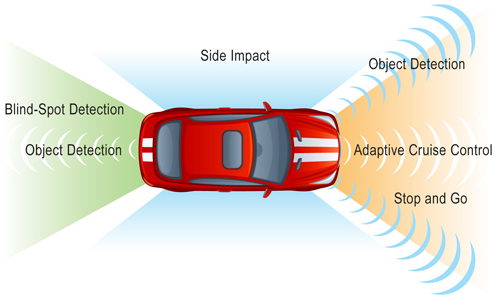
如图1所示,在各个功能里面视觉占据了一个很重要的 地位。在路线偏差告警 (LDWS)、停车 辅助(基于视觉)、停车辅助(360度环 视)、远光近光调整 (HB/LB)、盲点识 别(Blindspot)和交通信号识别 (TSR) 等应用中。在不同级别的低成本、紧凑 级、中级车和豪华车里面,未来到处都 可以看到视觉系统在里面的身影。
首 先 以 日 系 车 辆 为 例 , 这 里 简 单 说明一下,来自日本国土交通省和汽车 事故对策机构NASVA的评测结果显示, 大 部 分 自 动 制 动 器 启 动 速 度 区 间 为 1 0 -
60km/h,其中少部分为10-30km/h或者
10-25km/h, 探测方法则多数为光学雷 达、单眼摄像头以及毫米波雷达。车道 偏离报警得分较高的车型大都探测方法 为 毫 米 波 雷 达 及 单 眼 摄 像 头 , 而 其 自 动制动器启动速度区间大多为10-60km/ h。从日本车企的角度分析,主系统和 复杂系统一起使用,装配在不同等级的 车上。以日产车系为主,甚至在自动制 动方面都投身于视觉系统的方案里面。 先拿Eyesight来作为切入点,以立
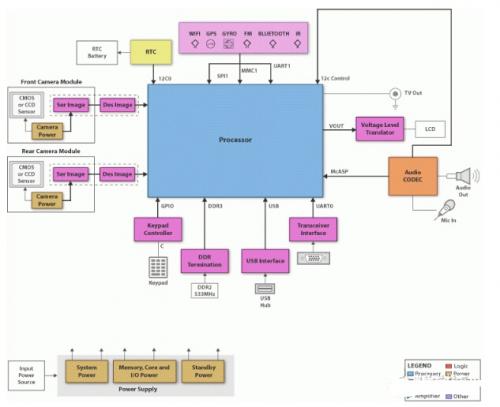
图3 算法布置的两种架构和整个ADAS系统的构成

图4 双目/立体摄像头产品图

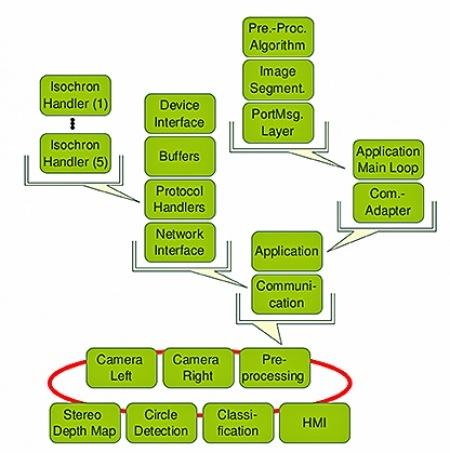
图5 立体摄像头架构和立体摄像头处理算法结构

图6 图像处理芯片概览

图7 ADAS前端和周边监测解决方案示例
体摄像头为系统核心的。我们从富士重工摄像头的系统的发 展历程就可以看到其重要性 。可以说,视觉系统的应用成熟 度 , 关 乎 到 消 费 者 的 使 用
体 验 和 系 统 成 本 , 是 近 年 各 家汽车OE M、 Tie1厂家乃至 芯片公司投入的重点。2 第二部分 视觉系统
架构图 像 系 统 可 以 分 传 感 器 和 处 理 器 两 部 分 , 按 照 一 个 简 单 的 分 类 , 处 理 器 与 摄 像 头 结 合 在 一 起 处 理 后 交 由 汽 车的ECU发送信息,或者摄像 头通过图像传送给ECU之后再 在里面进行处理。
这 里 我 们 以 立 体 摄 像 头 为 例 , 这 些 分 别 是 各 大 知 名 品 牌 的 立 体 摄 像 头 , 其 内 部 的结构可如图5所示。
车 规 级 摄 像 头 要 求 严 格 , 在 低 照 度 下 的 性 能 、 动 态范围、近红外线(NIR)敏 感性、-40~+105℃宽温度范 围 下 的 图 像 品 质 、 长 期 可 靠 性 、 图 像 资 料 完 整 性 和 稳 健 性 等 方 面 的 要 求 , 使 得 国 内 短期内在CCD和摄像头本体 部 分 , 做 起 来 很 困 难 。 其 实 所 有 的 汽 车 应 用 的 图 像 传 感 器 和 图 像 处 理 芯 片 , 都 要 求 符合AEC-Q100,并在ISO/TS
16949认证的设施中生产。

图8 ADAS单目摄像头后视监控解决方案示例
3 第三部分 芯片解决 方案
由 于 视 觉 系 统 其 最 初 在 汽 车 领 域 应 用 并 不 广 泛 , 在 消 费 电 子 、 安 防 领 域 有 着 较
为广泛的应用,但是随着汽车电子的发展,其目前在汽车应用领域虽然有着很高的可靠性和安全性的门槛,但也并非是 牢不可破。如下图6所示,其中ST Micro EyeQ2已经从2代演 化到了4代,市场份额比较高。目前较受关注的ADAS芯片产 品也请见图6。
对于图像检测算法而言,其任务需求基本分为:
1)检测前方所有的车辆;
2)检测两侧车道线;
3)测算与前方车辆的距离;
4)测算与前方车辆的相对速度和相对加速度;
5)检测车道内的前方车辆:识别车辆依照的是对三个 特征的检测(车辆后部的矩形、后轮和2个尾灯);
6)检测弯道;
7)检测行人;
8)识别交通信号。
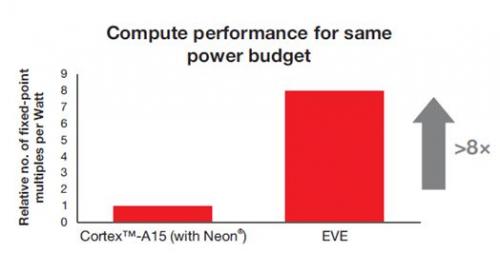
这里需要提及的是东芝半导体的最新Visconti 3系列图像 识别处理器,拥有1-4个图像采集通道、两个Cortex A9处理 核心、64GB屏蔽式堆读内存Mask ROM以及2MB SRAM、单 通道PCI Express接口。这一系列芯片采用多核、高度并行、 并发架构,低功耗,高性能,能够快速地进行视觉运算和处 理,图案检测和识别。其中多核架构,可一次运行多达4个 应用,包括LDW:车道偏离警告,FCW:正向碰撞警告, PD:行人检测,TSR:交通标志识别。高速图像识别 方面 可以通过HWA (硬件加速器)实现高速处理 。速度比1G CPU快50倍,典型功耗为1.2W,非常适合汽车电子应用。4 第 四 部 分 东 芝
ViscontiTM解决方案
东 芝 提 供 多 种 最 新 一 代 的 ADAS解决方案,包括可平行运 行多个识别应用的图像识别处理 器以及输出级予以优化以提供最 大系统效率的系统电源IC等。
其 中 , 针 对 A D A S 前 端 和
周边监测解决方案,ViscontiTM TMPV75和TMPV76系列的图像 识 别 处 理 器 能 够 实 时 处 理 器 能 够实时处理从一个至四个摄像头的输入图像(并允许最多 连接8个摄像头)。TMPV75和TMPV76系列可平行运行多个 ADAS应用,以识别车辆、行人、交通线路、交通标识以及 车辆周围的类似对象。可能的应用包括车辆检测和碰撞警 告;行人监测和碰撞警告;扯到检测和偏离警告;交通标识 识别;以及红灯信号检测。TMPV75和TMPV76系列结合了高性能和低功耗热点。
而 针 对 A D A S 单 目 摄 像 头 后 视 监 控 解 决 方 案 ( 后 方 监 视 器 、 电 子 后 视 镜 、 电 子 车 门 后 视 镜 ) 而 言 , 东 芝 的 TMPV7502XBG采用了单目摄像头的单一视频输入接口通 道,所以同时具有高图像识别性能和低功耗特点(东芝测量 的值为0.6W典型值)。所以,TMPV7502XBG可提供小型封 装。它适用于后方监视器、电子后视镜和电子车门后视镜应 用,用于提供车辆和行人的识别以及移动对象的检测功能。 视觉系统的限制运用条件比较多,这里可以从现有的 系统中看到,所以一般也是作为系统感知源的一部分。图像 识别处理器是ADAS的一部分构成和信息来源,但也受制于 一些客观因素,例如糟糕夜视环境、恶劣天气(如雾霾、暴 雪)等。东芝半导体也在不断地针对更多的环境因素,更新 和改善我们的解决方案,东芝一直致力于改善人民的生活质 量,就汽车电子而言,东芝希望提供领先的、以未来为导向 的半导体技术,以此提供改进驾驶安全性的汽车半导体器件 以及全面的驾驶员辅助解决方案,为人民生活带来更多的便捷。



评论