基于LabWindows/CVI的Modbus通信实现

虚拟仪器(Virtual Instruments)是80年代末出现的概念,即在通用硬件平台上通过更改软件功能,设计出不同功能的测试仪器,能大幅缩短研发周期,降低成本。NI公司的LabWindows/CVI具有强大的图形界面设计功能,以ANSIC为核心,提供了丰富的库函数与仪器驱动。
本文引用地址://www.cazqn.com/article/201610/306200.htmModbus是由MODICON公司于1978年提出并倡导的一种协议,其应用领域包括生产过程自动化、过程控制和楼宇自动化。目前主要通过以太网上的TCP/IP、Modbus令牌传递网络以及各种介质上的异步串行传输来实现。
文中以自动卷烟机械控制系统为例,自动卷烟控制系统完成卷烟动作需要多个设备协同动作完成,该系统可视为一个过程控制系统,需要对各设备的工作状态进行实时监控并要求能实时响应用户的操作。采用Modbus协议通信的方式,以上位机作为通信主站,将遵循完成对从站的动作控制。然而对于较为复杂的Modbus通讯协议的各设备作为子站完成组网,可方便地以通信的方式与从站完成信息交互并过程控制系统,常规的组态软件难以消除实时通信与界面响应之间的冲突,采用LabWindows/CVI实现Modbus协议,可充分利用多线程编程技术解决此问题,从而避免产生冲突时造成控制系统的故障。
1 Modbus协议描述
1.1 Modbus帧描述
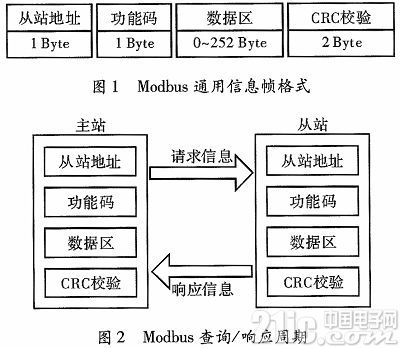
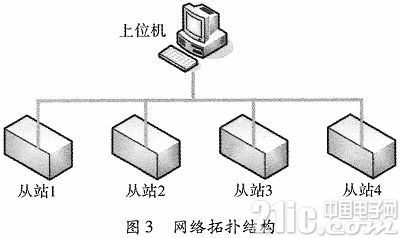
Modbus协议是一种应用层报文传输协议,是一种请求/应答协议,依照功能码定义提供相应的服务,协议定义了一个与通信层无关的通用信息帧,帧格式如图1所示,首先由主站依据相应的请求消息格式建立发送帧发起通讯,从站接收主站请求信息后作出响应,一个请求/响应周期如图2所示,包含了1个主站请求帧与从站回复帧。Modbus协议有3种不同的通信类型,分别是主站请求通信,由主站发起;从站正常响应,对主站的请求作出处理后无差错的回复帧;异常响应,从站发生异常情况后对主站请求的异常回复。
1.2 Modbus传输模式
Modbus协议定义了两种串行传输模式,分别是ASCII模式和RTU模式。两种模式使用不同的方法对帧起始和传输做出定义。在同样的波特率下,相比于ASCII模式,RTU模式具有更高的吞吐率,故工业现场控制的智能仪器仪表大多选用RTU模式。同样,自动卷烟机Modbus网络传输使用的是RTU模式。RTU模式以传输相邻字符的间隔时间作为报文起始和结束标志,两报文间必须有大于发送3.5个字符的时间,同一个报文传输中,相邻字符之间间隔必须小于发送1.5个字符的时间。实际应用中,需要根据网络采用的波特率来确定标识帧起始和结束时间,以波特率9 600 bit·s-1为例,1个字符用8 Byte表示,则发送1个字符的时间为ts=8/9 600≈0.83 ms。1.5个字符对应的时间约为1.25 ms,3.5个字符对应的时问为3 ms,计算出的时间作为帧起始与结束的依据。
2 多线程技术的应用
LabWindows/CVI采用事件驱动与回调函数的编程方式,对于传统的顺序过程控制,无需使用多线程。当系统任务实时性要求较高时,CPU如果一直执行实时性任务,则不能响应界面的其它事件。引入多线程技术可以较好地解决这个问题,操作系统中,线程是进程的一个执行单元,是可以由系统调度的最简单的代码单元。对于单核系统,多线程技术充分应用了CPU的空闲时间片,利用空闲时间片在主线程与次线程之间进行切换,由于系统切换速度快,所以两个程序可视为同时运行。
多线程技术主要是线程池技术与异步定时器,线程池技术利用线程池对多个线程进行分配,适用于不定时事件。异步定时器使用的是Windows多媒体定时器,适用于定时循环事件,当有多个异步事件执行时,优先采用线程池技术。
3 Modbus协议实现
3.1 网络拓扑结构
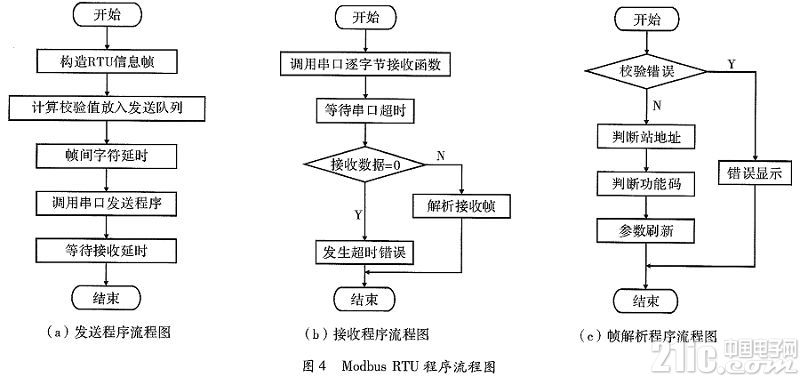
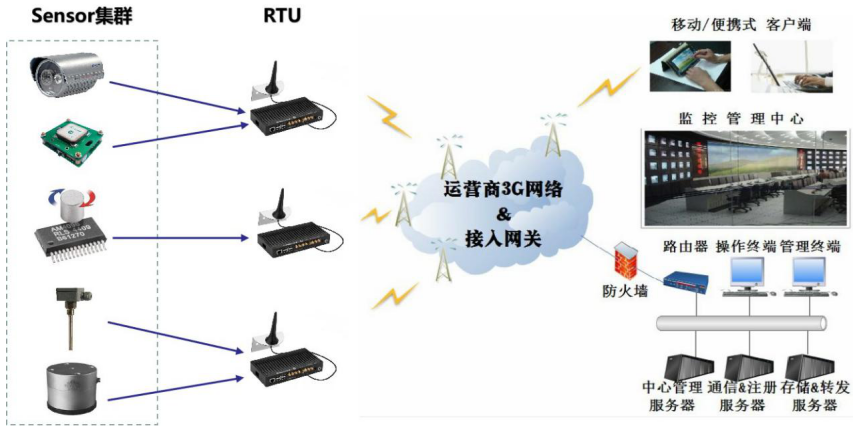
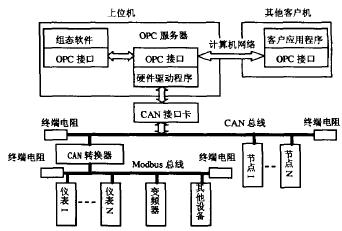
自动卷烟控制系统包含5个站点,上位机作为主站点,4个从站对应4个执行机构,其网络拓扑如图3所示,主站需要实现的功能主要有3个方面:(1)轮询功能。实时查询子站的转速信息,位置信息以及极限位置信息。(2)独立控制功能。单独控制从站执行机构动作,例如启动,停止。(3)参数刷新功能。刷新参数信息,如转速,运动位置等。
3.2 线程分配
轮询功能及参数刷新功能在系统运行过程中持续执行,如果在主线程中完成,会使CPU一直处于忙状态,无法响应界面对从站的单独操作,造成界面响应与实时性任务存在冲突。解决办法是开辟新的线程,将轮询功能以及参数刷新功能放到次线程中完成,这样既能保证系统能及时响应,又保证实时任务顺利执行。程序初始化时,新建线程池,调用线程池分配函数CmtScheduleThreadPoolFunetionAdv()新建轮询线程PollThread(),发送线程SendRTUThread()以及接收线程ReceiveRTUThread()。轮询线程实现轮询功能,通过通讯操作获取从站的实时信息,发送线程和接收线程针对用户的界面操作,分别完成从站的独立控制功能。
3.3 Modbus协议实现
3.3.1 线程安全变量定义
通信过程中,多个线程访问的全局变量有两种,分别是发送和接收信息帧。各从站的速度和位置等信息,由于变量较多且类型不一,如果全部定义线程安全变量,可能会造成线程发生阻塞,故将集中访问的变量定义为结构体变量,再调用DefineThreadSafeVar。(VarType,VarName)将结构体变量声明为线程安全变量。每次访问这些变量之前,都需要调用函数GetPointerToVarName(void)获取对应线程安全变量的指针,访问完后,调用ReleasePointerVarName(void)函数及时释放指针。
主程序中定义了Modhus RTU帧的结构类型,如下
typedef struct
{
int ByteLength;//帧内字节数
unsigned char message[256];//帧信息数组
}Message;
帧变量用来存放发送帧或是接收帧的全部信息,针对每个从站定义了结构变量类型,表征从站的特征信息,如下
typedef struct
{
int velocity;//速度信息
int codevalue;//编码器信息
int startplace;//起始位置
int endplace;//终止位置
int slavestate;//子站在线状态
int errorstate;//子站错误状态,用于异常响应
}Slave;
3.3.2 应用层协议实现
轮询线程周期性地查询各个子站,发送线程完成主站对从站的单独控制功能并及时响应界面事件。其次,新建一个异步定时器,完成参数的定时刷新。为保证界面响应的实时性,对3个线程的优先级进行规定,优先级从高到低为发送线程,接收线程,轮询线程,异步定时器。
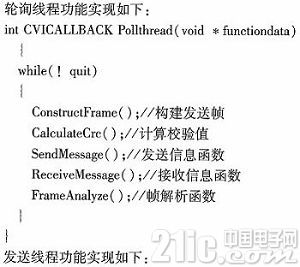
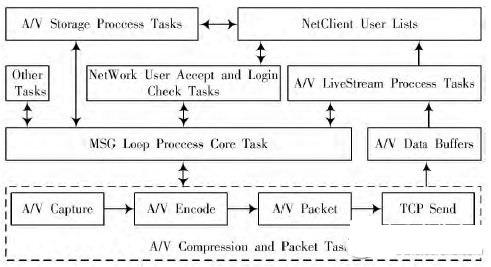
每个线程都需完成主站与从站之间的通信,将Modbus主站的一次通信分解为3个流程,分别是发送,接收和帧解析,完成3个流程则表明主站与从站完成了一次完整的通信。定义发送函数SendMessage()、接收函数ReceiveMessage()与帧分析FrameAnalyze()完成上述流程,以方便各个线程调用,程序流程图如图4所示,发送程序内的帧间字符延时通过函数SyncWait()实现,要求>3.5个字符时间。
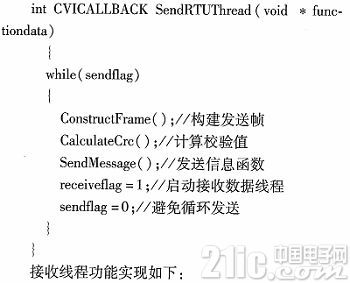
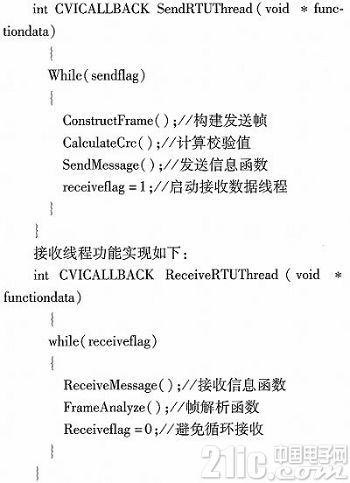
每个线程都为主程序预留了标志位,主线程通过置位while循环标志位来完成对线程的控制。轮询线程在程序运行过程中循环执行,并且由异步定时器实时获取最新的参数信息实时刷新界面;发送线程完成主站请求功能,接收线程获取从站的响应信息,解析从站接收是否正常并做出规定动作。发送和接收线程仅在响应界面事件时执行一次。
串口作为公共硬件资源,存在多个线程占用的问题,LabWindows/CVI为访问串口提供了一系列的接口访问函数。为避免各线程造成访问冲突,采用类似线程锁的机制来处理,将串口视为一个全局变量,为每个串口分配一个线程锁对象,任何时候访问串口之前都必须获取线程锁,访问完毕之后及时释放。
4 实验验证
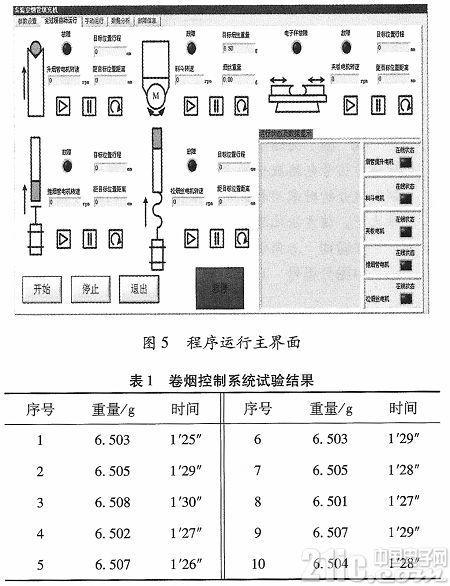
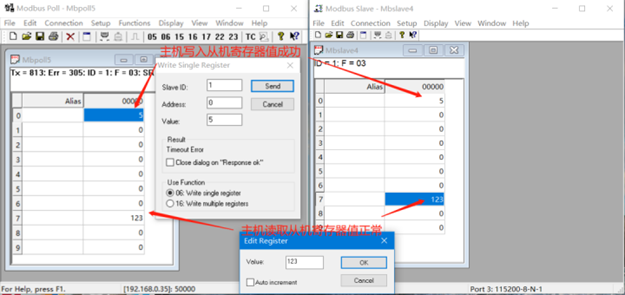
软件运行界面图5所示。卷烟控制系统对完成空烟管填充的要求为卷烟时间1.5 min,成烟重量为6.500±0.010 g。点击开始操作之后系统自动运行完成卷烟动作,在系统运行过程中,需不断发送查询指令轮询各从站转速及位置信息,由异步定时器进行刷新,每个从站都能单独控制启动、停止和复位功能,卷烟过程中不会发生死锁现象。以10支空烟管为例,记录完成每支烟管卷烟完成的时间以及重量,试验结果如表1所示。
5 结束语
利用LabWindows/CVI实现Modbus通信,充分发挥了虚拟仪器开发的便捷功能,完成了实时性控制工作。相比于使用组态王等软件,其功能更为丰富,并且可以充分利用多线程技术,合理分配多个实时性任务,保证多个并发任务顺利执行。



评论